

Autonomous location and navigation method and autonomous location and navigation system of robot
A technology of autonomous positioning and navigation methods, applied in the direction of navigation computing tools, etc., can solve problems such as complex equipment structure, huge data volume, and difficult operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
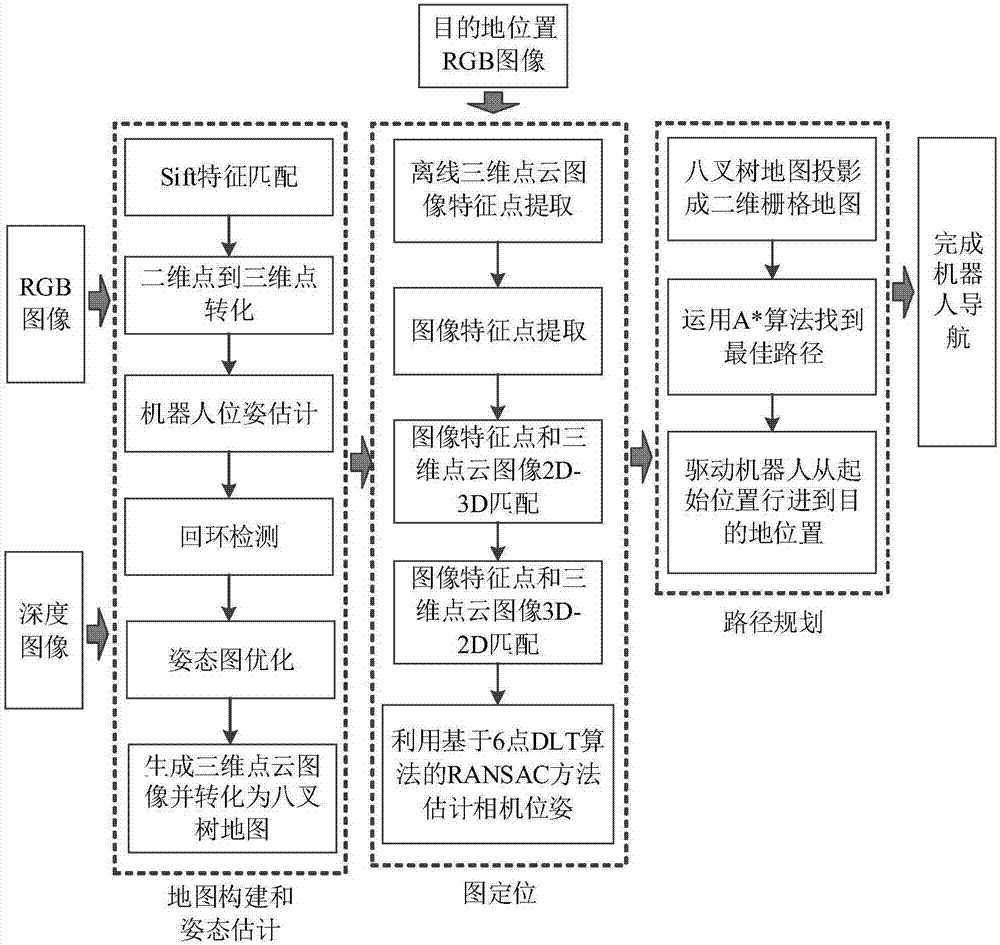
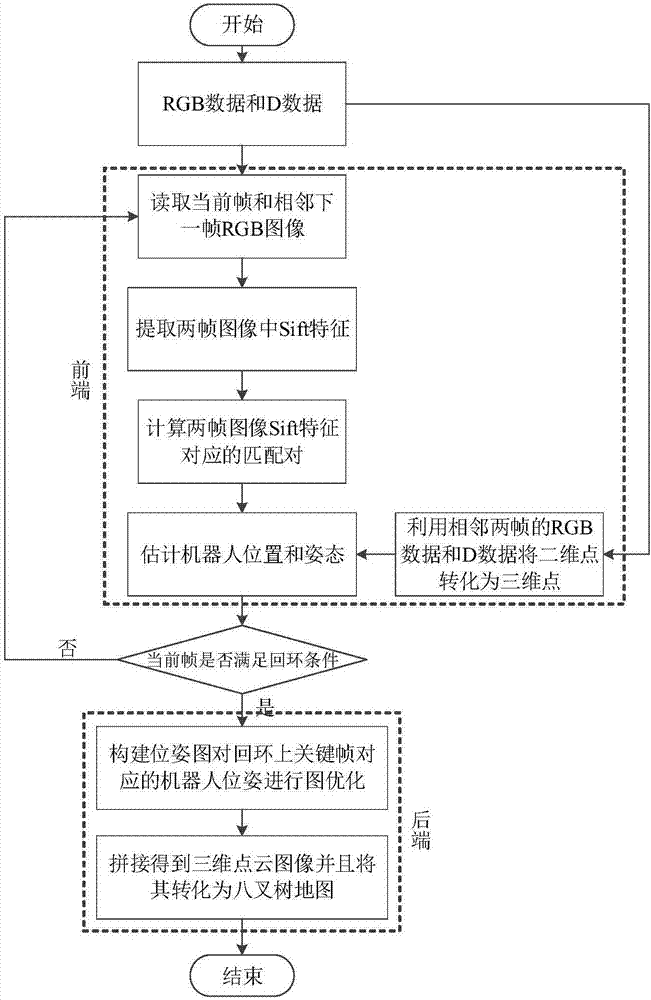
[0097] Such as figure 2 Shown is a schematic flow chart of another robot autonomous positioning and navigation method disclosed in the embodiment of the present invention, from figure 2 It can be seen that the input RGB image, depth image and destination location RGB image data need to go through several steps such as indoor map construction, robot and target relocation, path planning, etc., and finally complete the indoor robot autonomous navigation task. Its specific implementation is as follows:
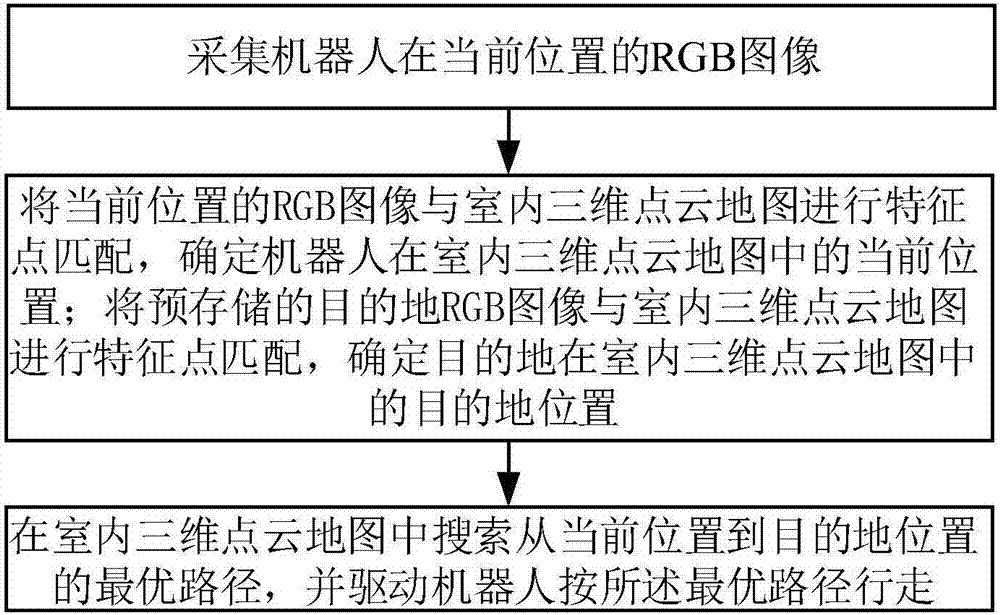
[0098] (1) Collect the RGB images and depth images obtained by the robot on the route of travel, wherein the route of travel is a closed route;
[0099] Robot A is in an indoor environment, and the robot is driven to move slowly in the environment. At the same time, the RGB-D camera on the robot is driven to capture all positions on the robot's path to obtain a series of RGB image data and depth image data. It is worth noting that because the robot needs to build an indoor env...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More