

Foot-operated lower limb exoskeleton exercise rehabilitation wheelchair
An exoskeleton and foot-operated technology, applied in the field of rehabilitation medicine, can solve the problems of poor economy, single training mode, and failure to make full use of power assistance, and achieve the effect of suitable promotion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
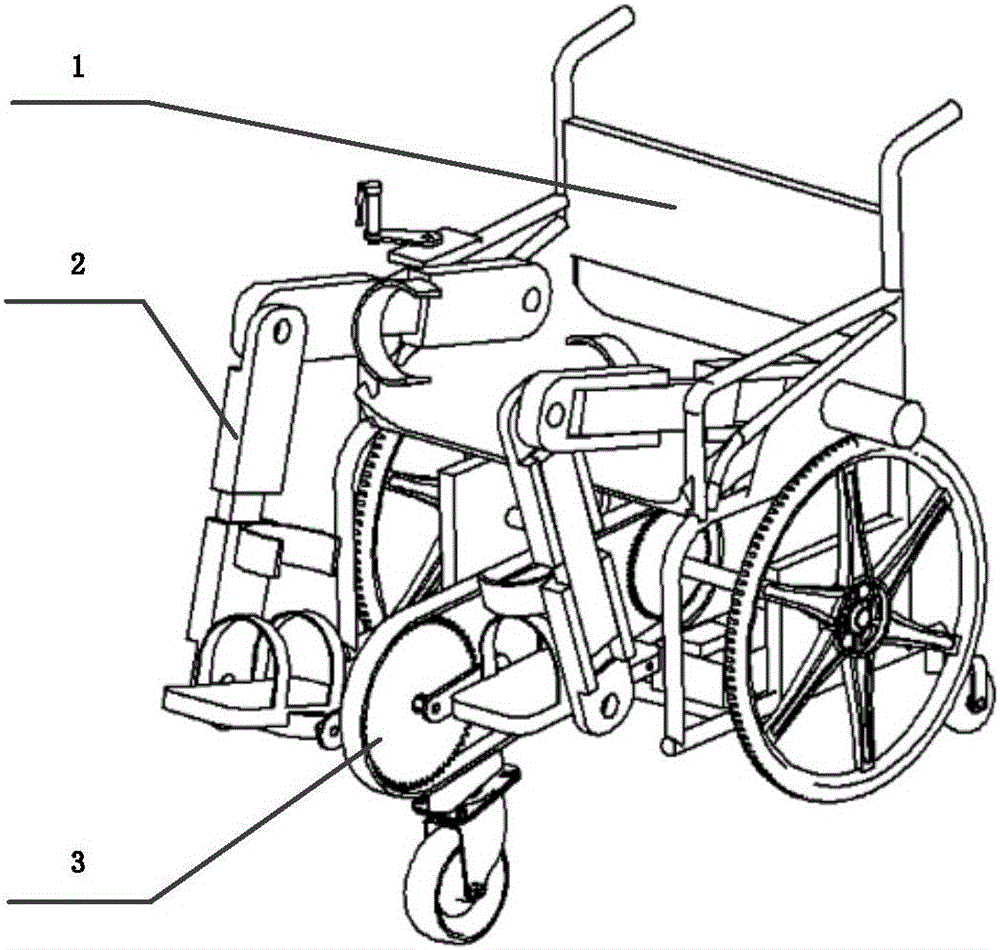
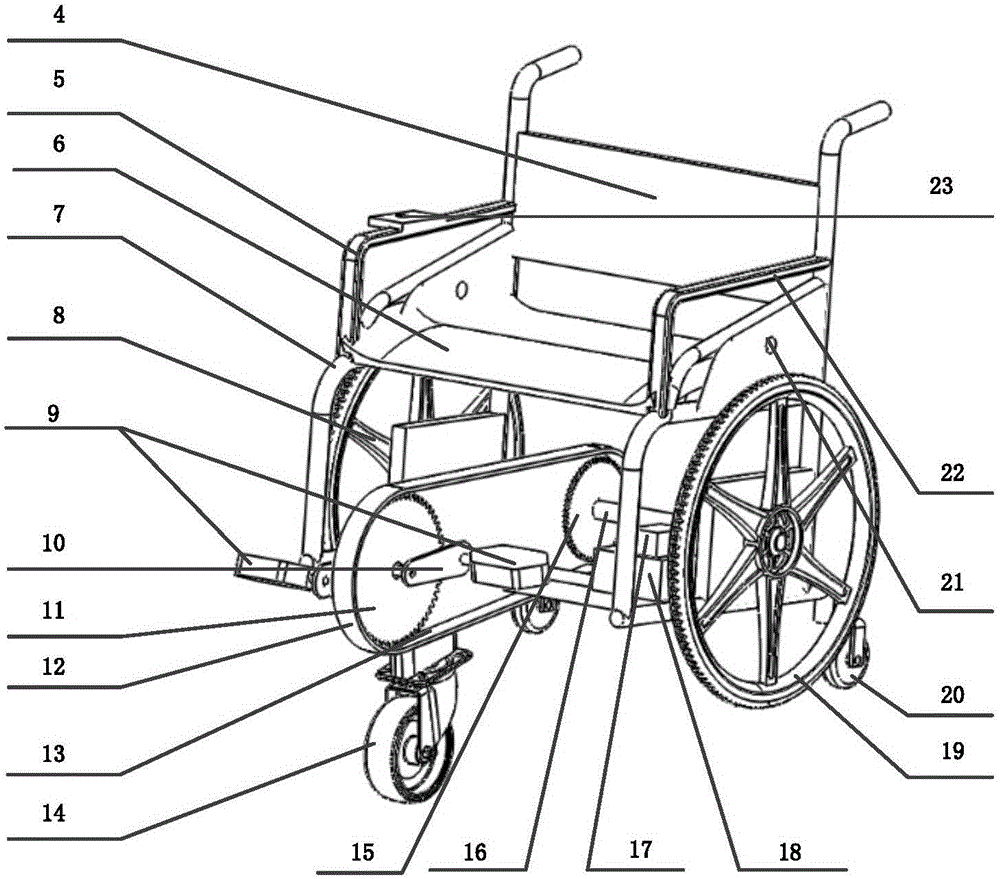
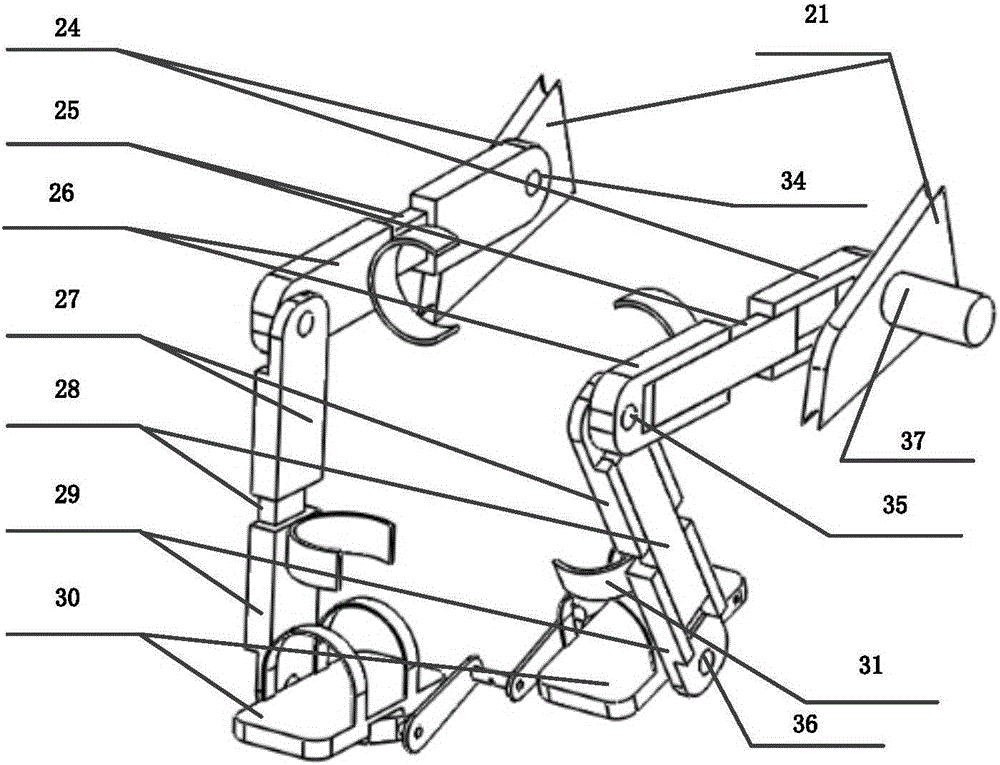
[0013] A foot-operated lower extremity exoskeleton sports rehabilitation wheelchair, which structurally includes two parts: a wheelchair frame and an exoskeleton mechanism, wherein the wheelchair frame includes two parts: a wheelchair frame and a transmission system; The harmonic fixing seat is fixed on the wheelchair, and on the other hand is connected with the wheelchair frame through a transmission mechanism, and the transmission mechanism is fixed on the wheelchair frame.
[0014] The wheelchair frame includes a wheelchair bracket, a wheelchair seat cushion, a wheelchair backrest, a wheelchair left and right armrests, a first universal support wheel, a second universal support wheel, a steering wheel, a steering brake handle, a brake line, left and right chair rear wheels, front and rear transmission Shaft, front and rear transmission gears, transmission chain, transmission gear protective cover, left and right cranks, left and right pedals and left and right pedals. Among...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More