

Autonomous navigation steering control method for agricultural vehicles
An agricultural vehicle, steering control technology, applied in adaptive control, general control system, two-dimensional position/course control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
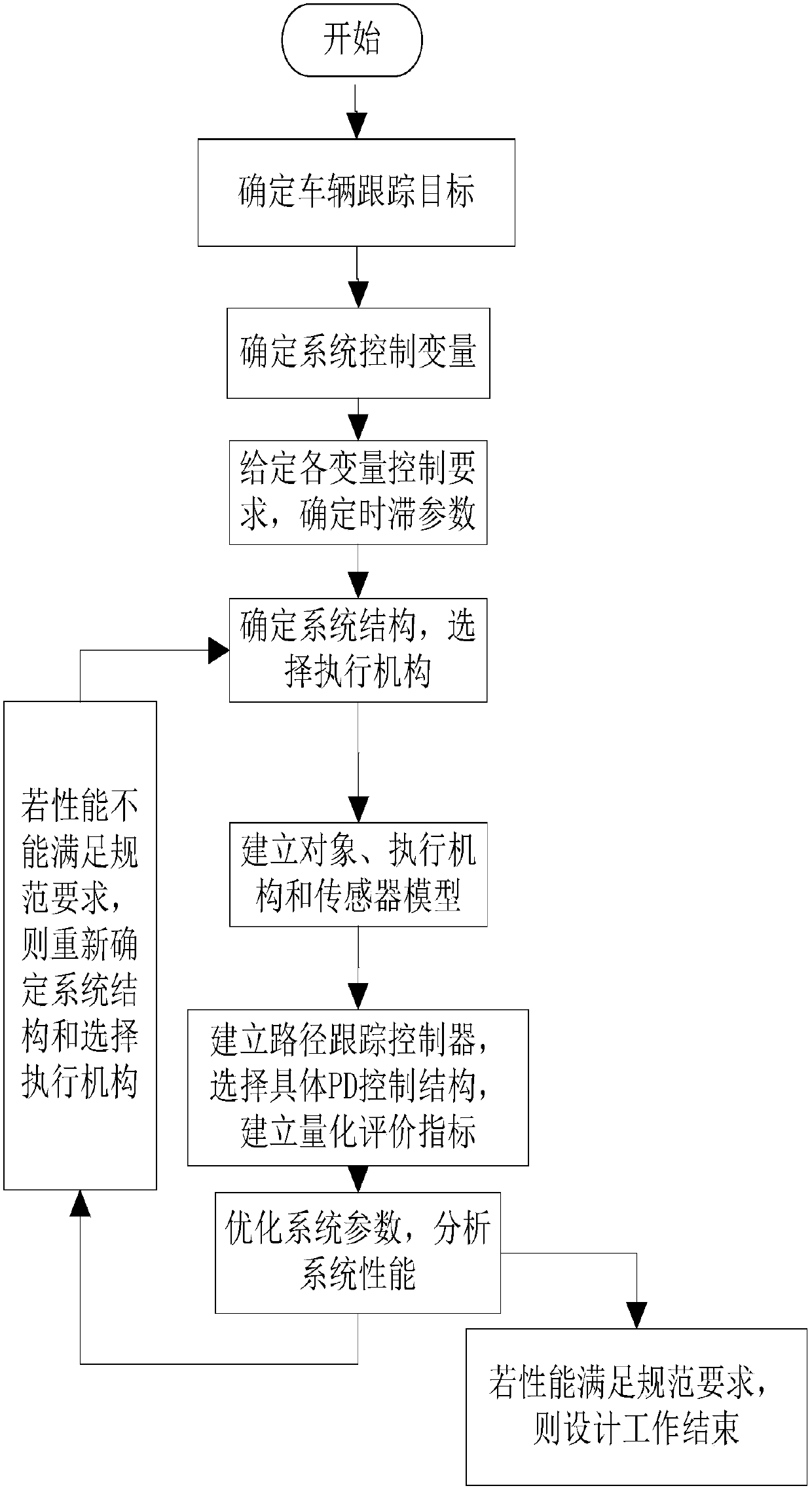
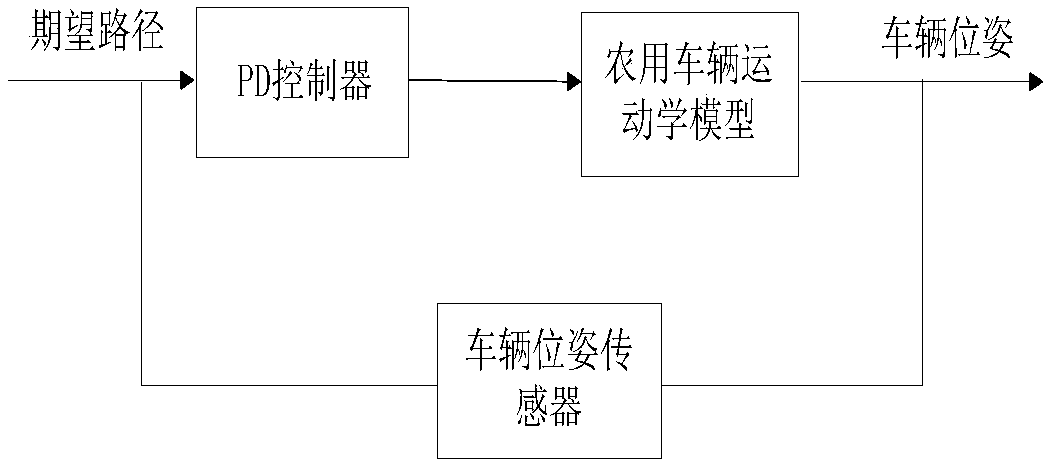
[0117] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
[0118] Firstly, the tables involved in the present invention will be shown one by one below.
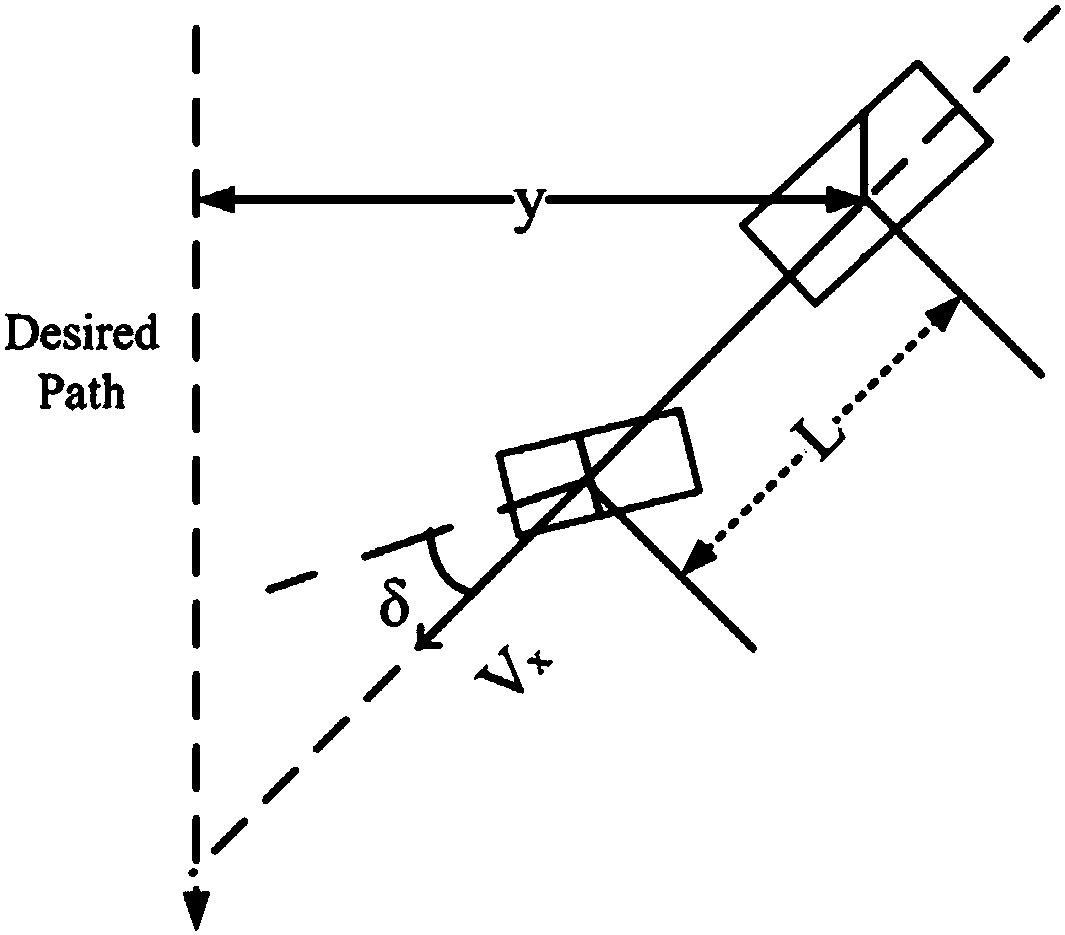
[0119] The kinematic state equation of the vehicle;
[0120]
[0121]
[0122] Table 1 and Table 2 are Routh tables for determining the specific adjustment range of controller parameters
[0123]
[0124] Table 1
[0125]
[0126] Table 2
[0127] Table 3. Closed-loop system unit step response performance index comparison table under ITAE criterion
[0128]
[0129] Table 4 Comparison table of system unit step response performance indicators under two fractional order PD controller structures
[0130]
[0131] Table 5 Control system performance index comparison table under the action of integer order PD and fractional order PD respectively
[0132]
[0133] Table 6 and Table 7 Integer-order optimal PD and fractional-orde...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More