

Multi-DOF manipulator independent grabbing inverse solution engineering algorithm
An inverse solution engineering and manipulator technology, applied in the field of multi-degree-of-freedom manipulators in the field of inverse solution engineering algorithms for autonomous grasping, can solve problems such as difficulty in positioning and grasping the end of the manipulator, heavy mental burden on operators, and fatigue-prone operation efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
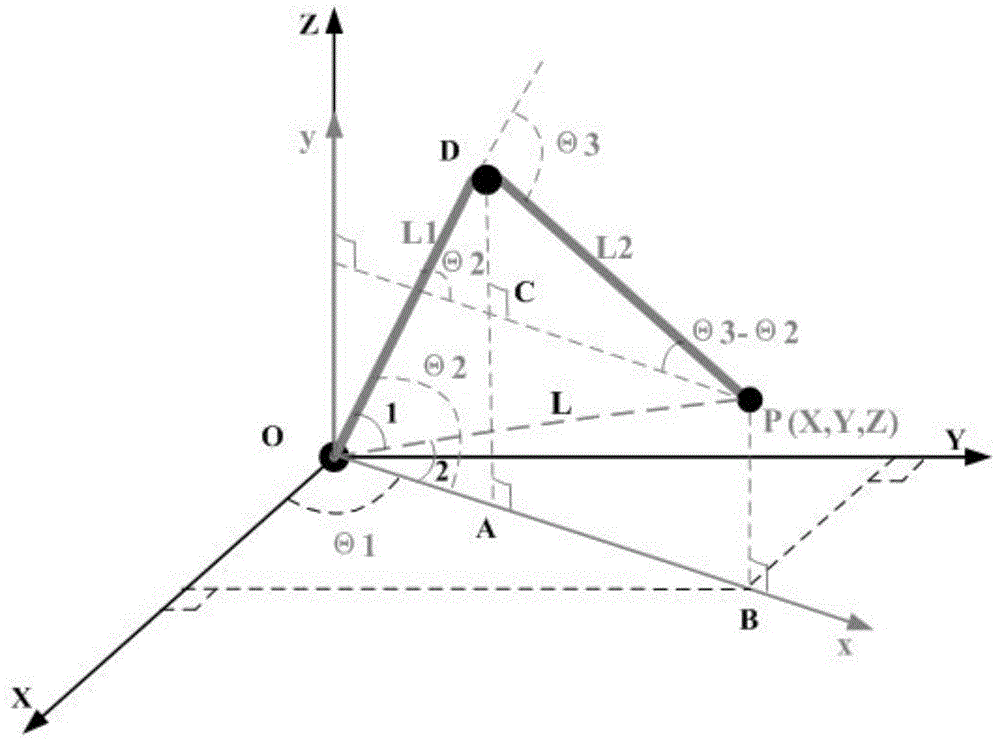
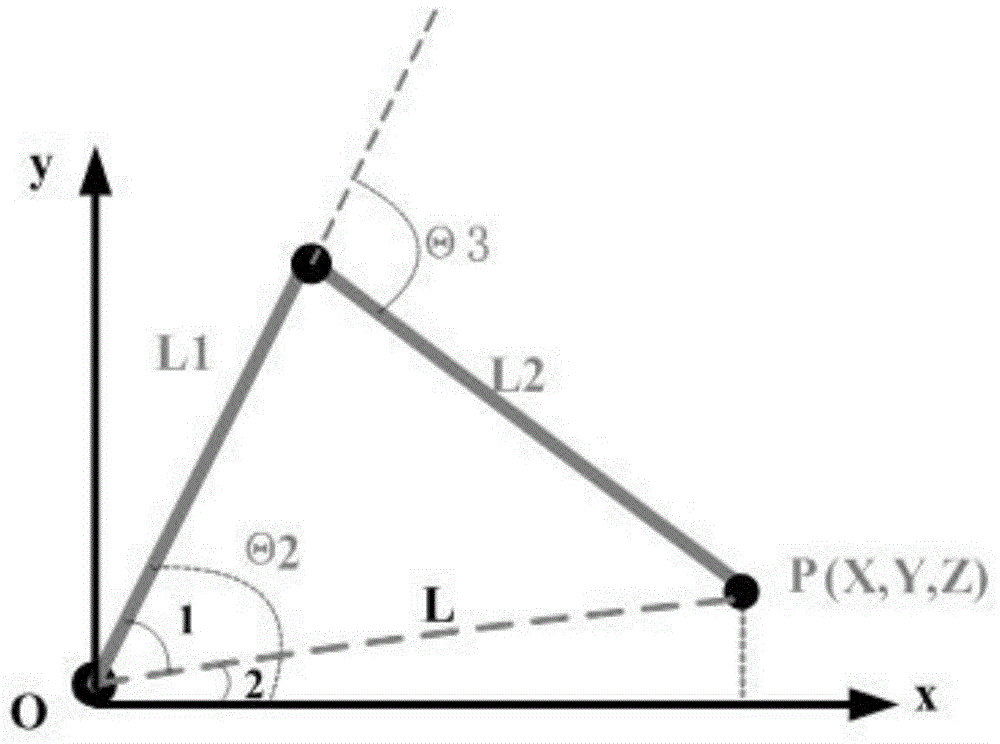
[0035] A multi-degree-of-freedom manipulator autonomously grasps an inverse solution engineering algorithm, which simplifies a space problem into a plane problem and simplifies the process of finding an inverse solution. The method includes the following steps (1) to (4):
[0036] (1) Judging and grabbing the target point P(X, Y, Z) based on the actual target image, without considering the target pose;
[0037] (2) According to the positive solution method of the manipulator, set the joint parameters of the 4-DOF manipulator as (θ 1 ,θ 2 ,θ 3 ,θ 4 ), the fourth joint relies on manual adjustment, so the relationship between the target point and the first three joints is obtained; if it is 5 degrees of freedom, the relative positions of the second and third joints, or the third and fourth joints can be fixed, simplified as 4 degrees of freedom manipulator;
[0038] (3) When finding the inverse solution, first turn around and find θ 1 , the subsequent solution is simplified ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More