

Transfer robot end effector comprising electromechanical servo system
A technology of electromechanical servo system and handling robot, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., which can solve the problems of not too high air pressure and difficult precise control of operating speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The content of the present invention will be further described below in conjunction with the accompanying drawings, but the practical application structure of the present invention is not limited to the following embodiments.
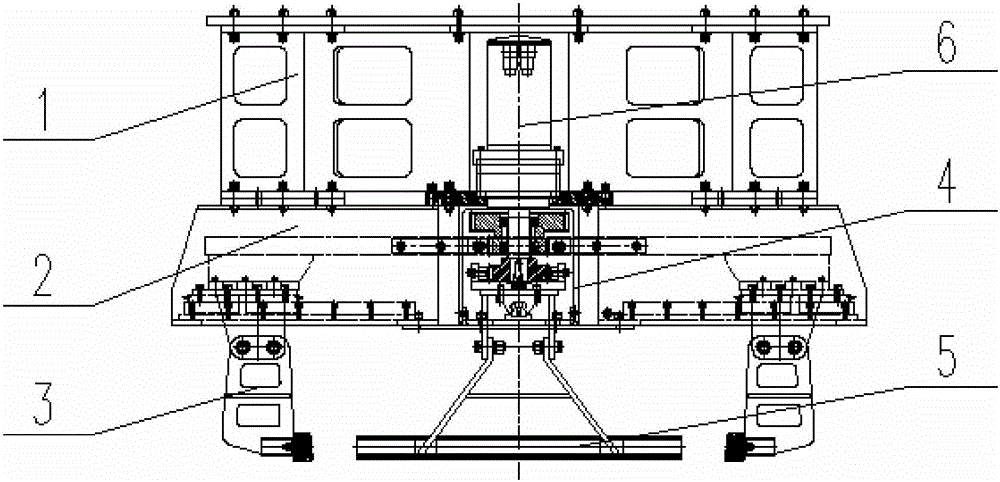
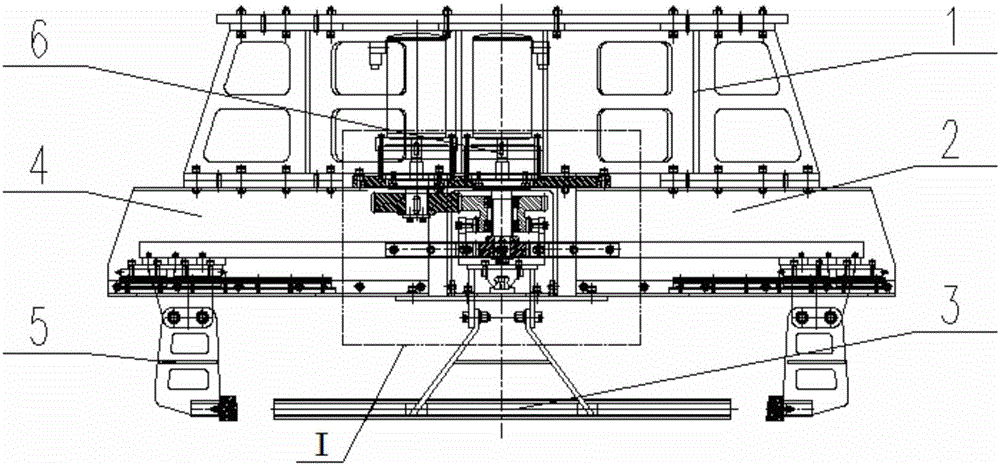
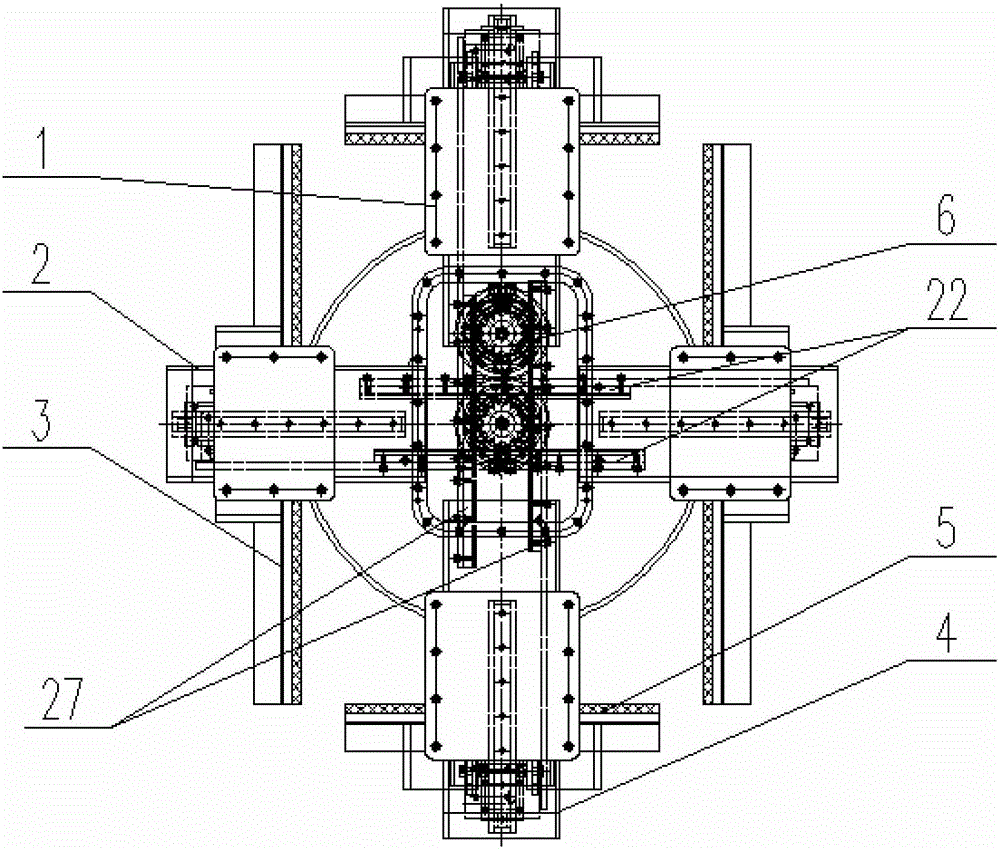
[0028] Referring to the accompanying drawings, the end effector of a handling robot including an electromechanical servo system according to the present invention includes a connecting body assembly 1, a gripper device and an electromechanical transmission device.
[0029] The upper part of the connecting body assembly 1 is connected with the wrist of the transport robot, and the lower part is connected with the left and right jaw fixed body 2 and the front and rear jaw fixed body 4 in the jaw device through bolts.
[0030] The jaw device is composed of a left and right jaw fixed body 2, a front and rear jaw fixed body 4, a left and right jaw 3 and a front and rear jaw 5. The left and right jaw fixed body 2 and the front and rear jaw fixed body 4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More