

A Nonlinear Integrated Control Method for Vehicle Lateral Stability
An integrated control, nonlinear technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., to achieve the effect of saving mass production cost and improving online computing performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention provides a kind of vehicle lateral stability nonlinear integrated control method, and this method comprises the following several steps:
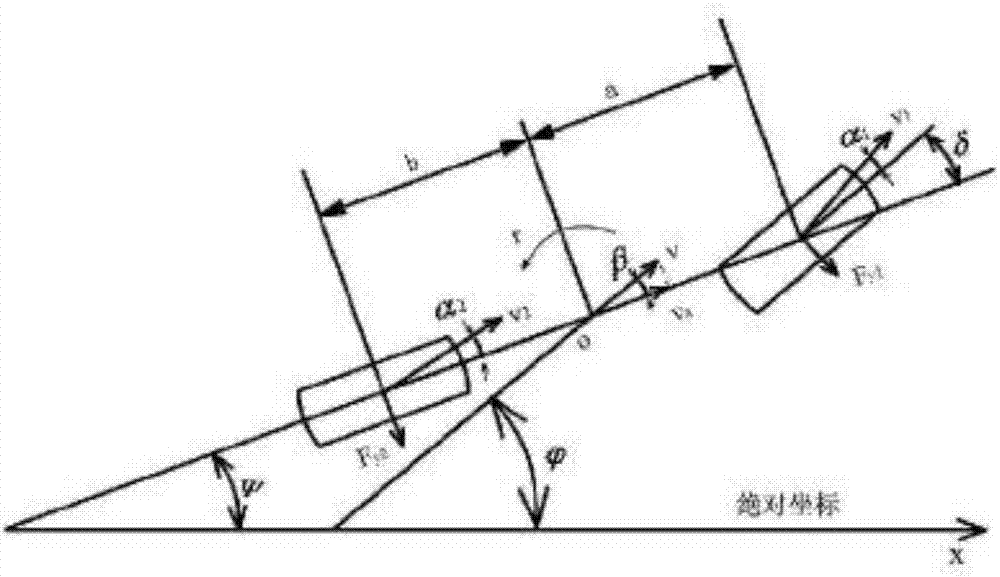
[0024] Step 1. In order to facilitate the analysis and control of the vehicle system, a two-degree-of-freedom vehicle model is established, such as figure 1 , used to characterize the relationship between the vehicle's handling stability and the vehicle's lateral and yaw motions. Considering the yaw motion and lateral motion of the vehicle, its dynamic equation is:
[0025]
[0026] Among them, F y1 , F y2 is the cornering force of the front and rear tires, in N; M is the additional yaw moment, in Nm; a and b are the distances from the center of mass of the vehicle to the front and rear axles, in m; I z is the moment of inertia of the car around the z-axis, unit kg m 2 ; r is the yaw rate, unit rad / s; v x is the longitudinal velocity of the vehicle, v y is the lateral speed of the vehicle, in m / s; m is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More