

Estimation method of installation error of DVL direction in SINS and DVL combination
A technology of installation error and error, applied in the field of DVL azimuth installation error estimation in SINS/DVL combination, can solve the problem of destroying the concealment of underwater vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
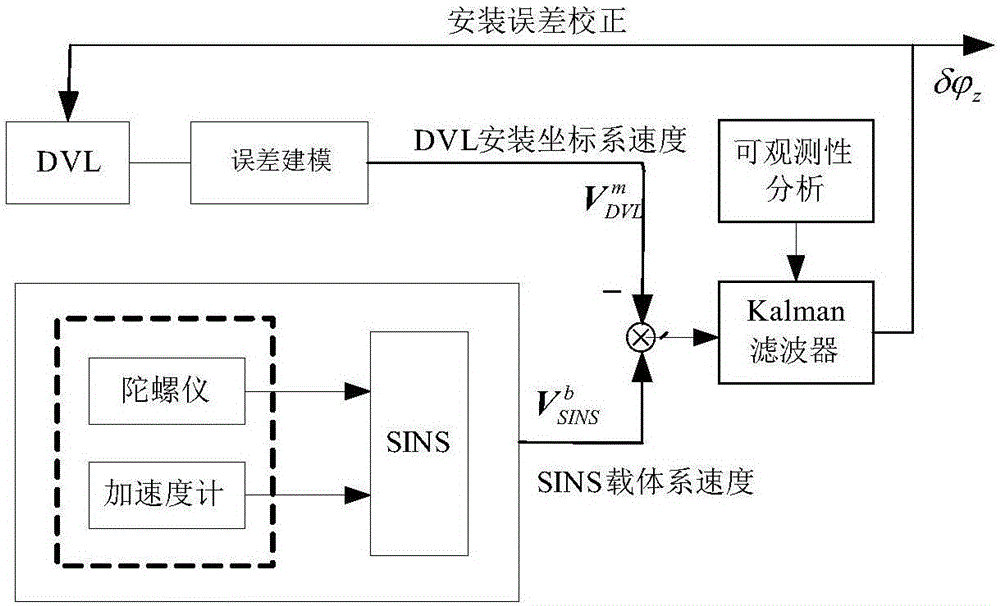
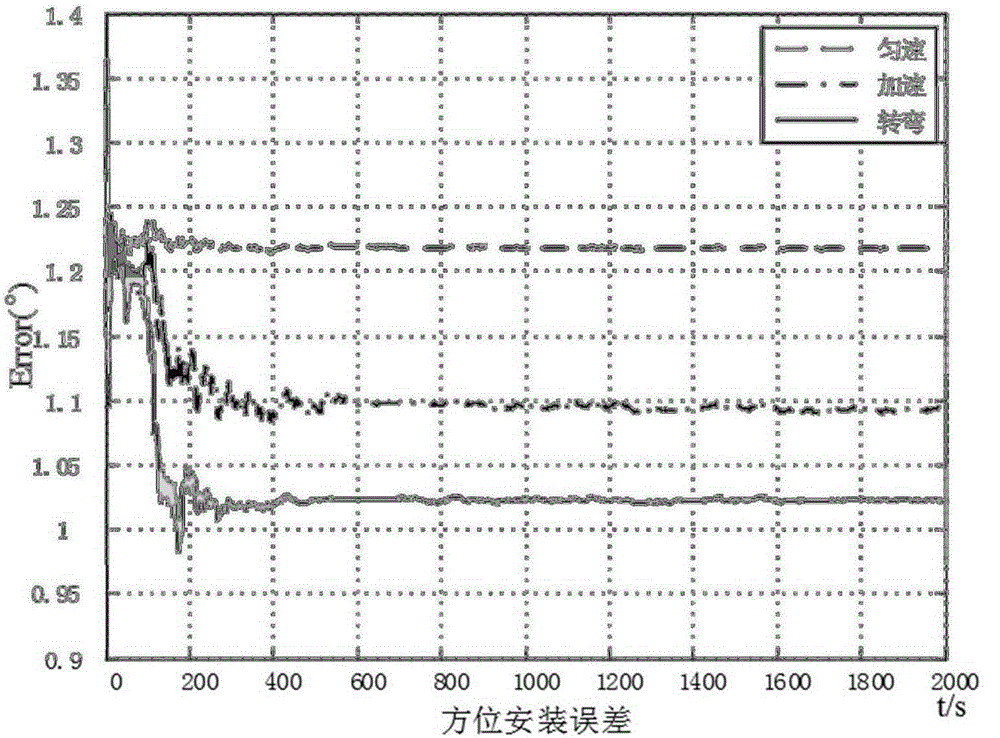
[0064] The present invention aims at the underwater integrated navigation system formed by DVL-assisted SINS, and selects SINS speed error, attitude error, position error, accelerometer zero bias, gyroscope zero bias, DVL scale coefficient error, DVL and IMU azimuth installation error in SINS as The state vector is used to construct the system state equation; the difference between the velocity of the SINS carrier body and the velocity of the DVL installation coordinate system is selected as the measurement vector to construct the system measurement equation; the Kalman filter is used as the SINS / DVL information fusion filter; the turning motion is selected to obtain The best observability of SINS / DVL azimuth installation error, that is, the best estimation effect.
[0065] Below in conjunction with accompanying drawing, the implementation method of the present invention is described in more detail:
[0066] A DVL orientation installation error estimation method in a SINS / DVL ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More