

3D printing welding method using multi-degree-of-freedom robot
A 3D printing and welding method technology, applied in welding equipment, manipulators, arc welding equipment, etc., can solve problems such as poor welding quality, and achieve the effects of stable welding, convenient operation and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
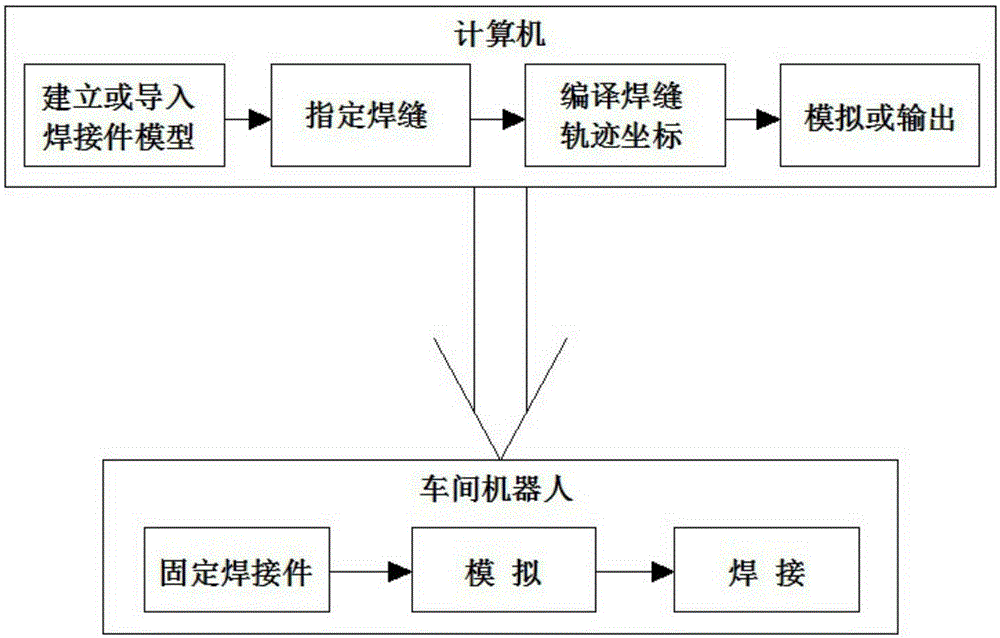
[0019] like figure 1 As shown, a 3D printing welding method using a multi-degree-of-freedom robot, the equipment used in this welding method includes a computer and a workshop welding robot controlled by it, and the following steps are used:
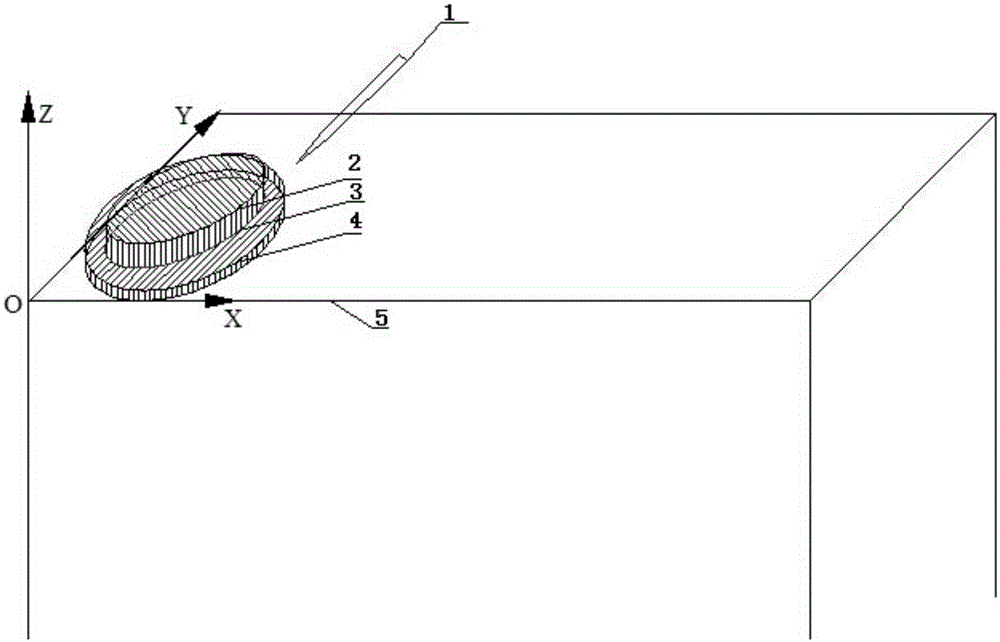
[0020] Step 1: Turn on the computer, create or import the 3D model of the weldment in proportion, and place the required weldment model on the computer simulation workbench, which is consistent with the position of the physical weldment on the auxiliary workbench in the workshop;
[0021] Step 2: Determine the position of the weld; find the part to be welded on the weldment, place the mouse pointer on one end of the weld, press and drag the mouse to draw the track of the weld, and release the mouse when finished; At this time, you can choose to weld according to the manually specified weld trajectory, or...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More