

Automatic workpiece loading assembly based on robot workpiece pickup
An automatic feeding and robot technology, applied in the field of auto parts, can solve the problems of complex mechanical structure and automatic control, unable to meet the needs of modern production, low feeding and conveying efficiency, saving manpower and time, and simplifying automatic control. , the effect of fast transmission speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
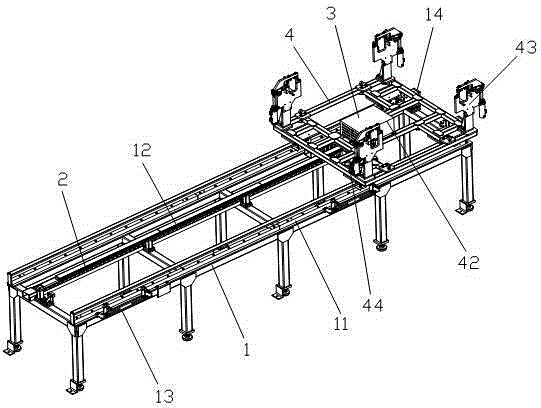
[0020] An embodiment of the present invention provides an automatic workpiece loading assembly based on robot pick-up, see figure 1 , the automatic workpiece loading assembly based on robot pick-up includes a slide base 1, a manual loading position 2 set on one end of the slide base 1, and a robot grasping position 3 set on the other end of the slide base 1 1. The sliding table walking trolley 4 located at the robot grabbing position 3;
[0021] The slide base 1 includes guide rails 11 arranged on both ends of the slide base 1, a slide rack and pinion 12 arranged in the middle of the slide base 1, an assembly switch 13 arranged on one end of the slide base 1, and a The sliding table guide limit assembly 14 on the other end of the sliding table base 1; the assembly switch 13 is used for starting, accelerating, decelerating, stopping and detecting the sliding table walking trolley 4;
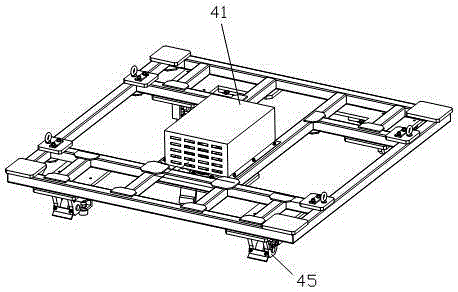
[0022] see figure 2 The slide table walking trolley 4 includes a trolley body 41, a trolley...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More