

Fiber grating six-dimensional force sensor and its main structure and measurement method
A six-dimensional force sensor and fiber grating technology, applied in the field of sensors, can solve the problems of reducing the measurement accuracy of the sensor, large zero-point drift, and difficulty in resisting electromagnetic interference for weak electric signals, and achieve self-decoupling measurement of three-dimensional force and three-dimensional torque, symmetry, symmetry, etc. Good sex, reduced number of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
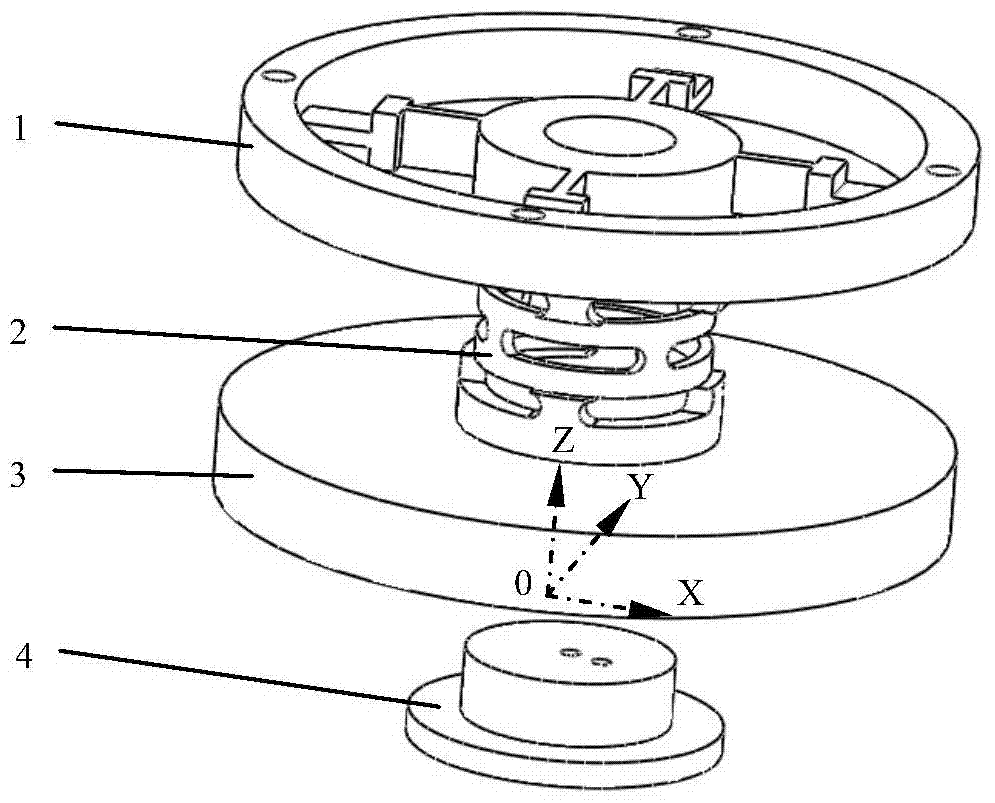
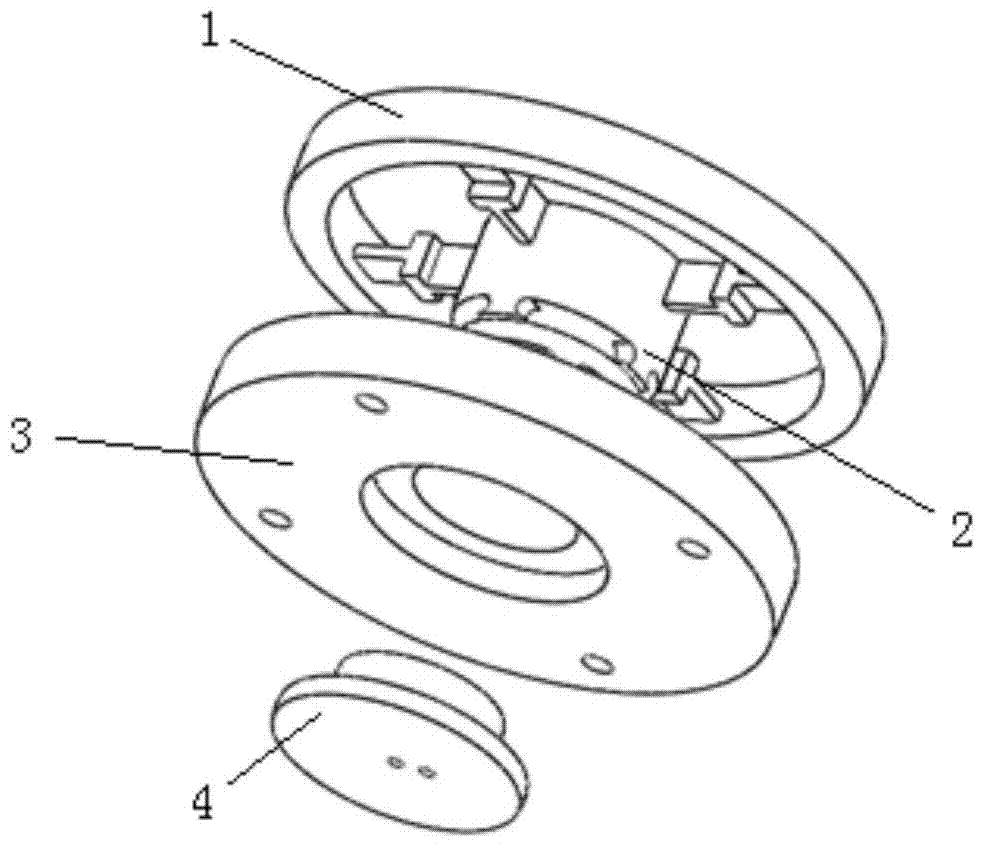
[0044] like figure 1 As shown, the sensor includes a main structure and a sensitive detection element.
[0045] The main structure includes an upper elastic disc 1 , a lower elastic cylinder 2 , a base 3 and a blocking cover 4 .
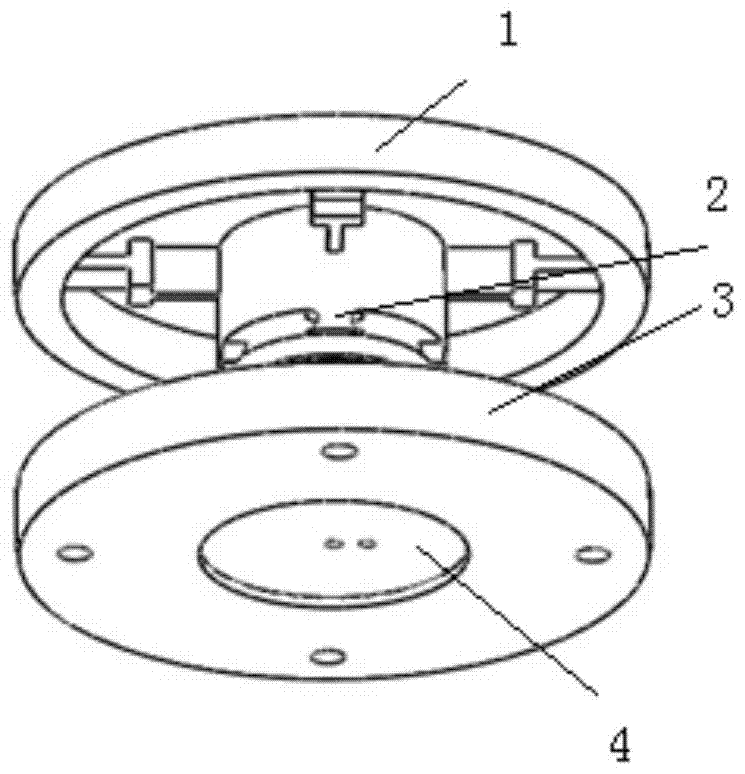
[0046] Among them, the upper elastic plate 1, the lower elastic cylinder 2 and the base 3 are integrally processed to form an integral elastic structure. The sealing cover 4 is an independent part, which is fixed by laser spot welding after matching with the hole below the base 3. The sealing cover 4 It only plays the role of fixing the optical fiber and leading out the pigtail, but has no elastic deformation function. image 3 It is a schematic diagram of the sensor after assembly and fixing.
[0047] like figure 1 In the mark, the main structure has the first axis, the second axis and the third axis perpendicular to each other to form a three-dimensional coordinate system (that is, an XYZ three-dimensional coordinate system is defined with the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More