

Space tether robot target capture stable control method
A stable control method and technology of space tethering, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the problems of unstable capture process, failure of capture tasks, difficulty in capture process, etc. The effect of small overshoot, short convergence time and high control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with the accompanying drawings:
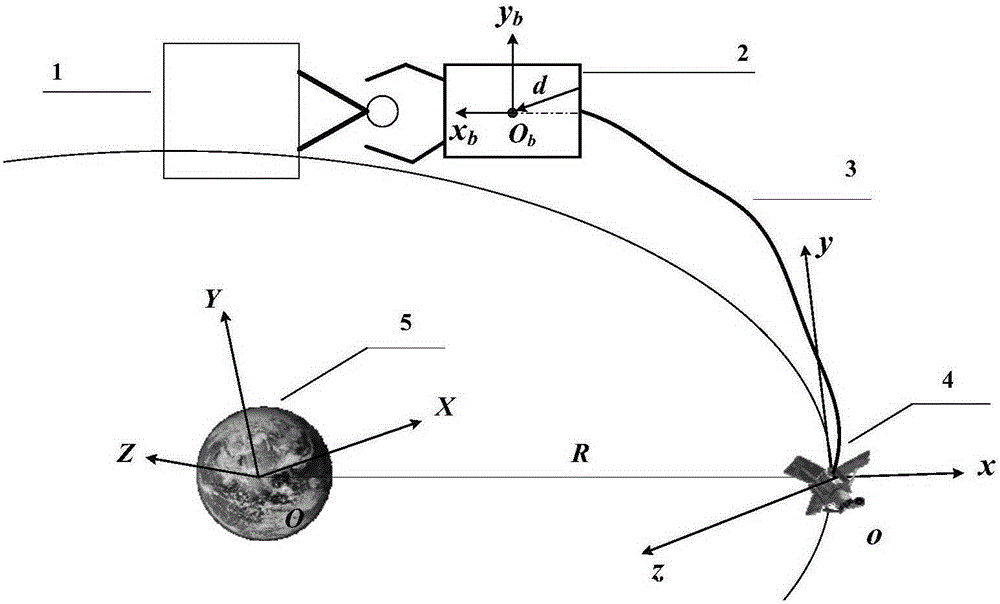
[0031] See figure 1 , The present invention includes the following steps:
[0032] The first step: Establish the dynamic equation of the space tethered robot target capture:
[0033] M ξ ·· + N ξ · + G = Q + τ
[0034] among them, l is the length of the space tether, α is the internal angle of the space tether surface, β is the external angle of the space tether surface, θ and ψ are the attitude angles of the space tethered robot; M is the system inertia matrix; N is a non-linear velocity related item; G is a gravity related item; Q is the control force and control moment of the space tethered robot; τ is the space tether interference term.
[0035] Step 2: Calculate the correction amount e of the desired pose of the space tethered robot
[0036] The correction amount of the desired pose of the space tethered robot satisfies the fol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More