

A Target Acquisition Stabilization Control Method for Space Tethered Robot
A stable control method and technology of space tethering, which are applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of failed capture tasks, difficult capture process, unstable capture process, etc. Short convergence time, high control accuracy and small overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The present invention is described in further detail below in conjunction with accompanying drawing:
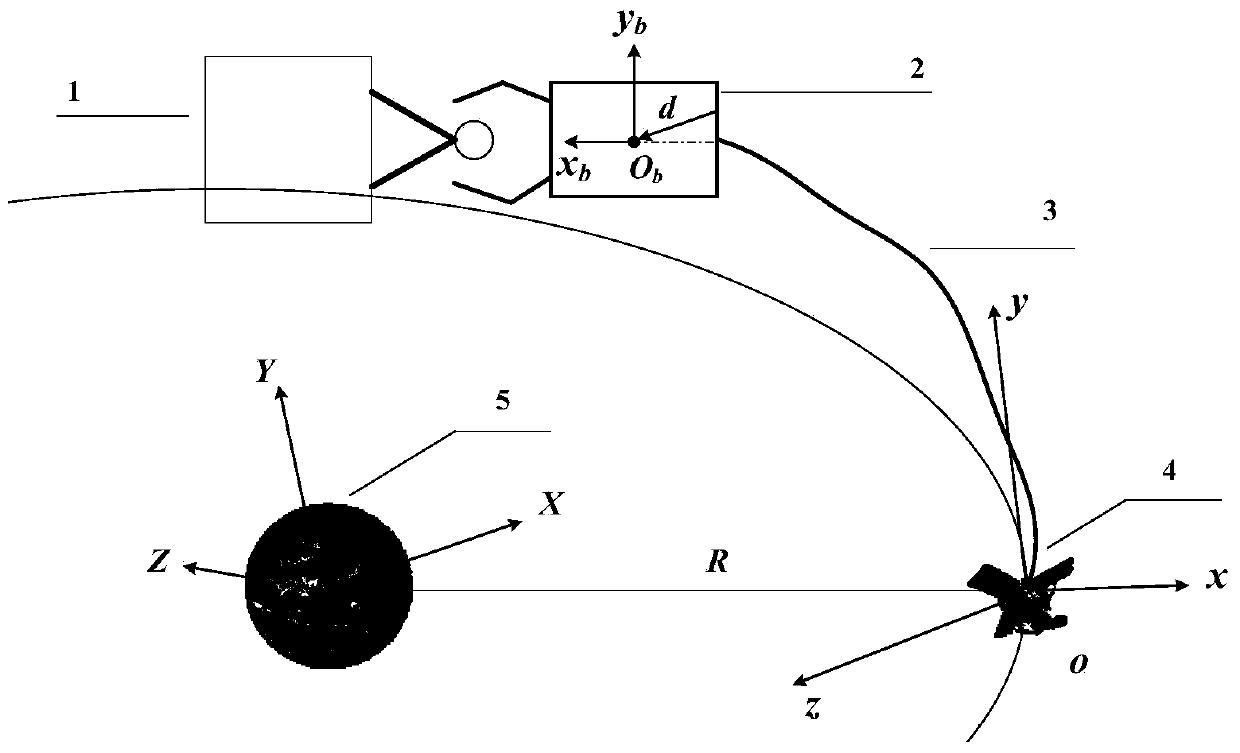
[0031] see figure 1 , the present invention comprises the following steps:
[0032] Step 1: Establish the target capture dynamics equation of the space tethered robot:
[0033]
[0034] in, l is the length of the space tether, α is the interior angle of the space tether surface, β is the exterior angle of the space tether surface, θ and ψ are the attitude angles of the space tethered robot; M is the system inertia matrix; N is the nonlinear velocity related item; G is the gravity related item; Q is the control force and control torque of the space tethered robot; τ is the space tethered interference item.
[0035] Step 2: Calculate the correction amount e of the desired pose of the space tethered robot
[0036] The expected pose correction of the space tethered robot satisfies the following relationship:
[0037]
[0038] Among them, i is the contact and c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More