

Method of retrieving and releasing unmanned aerial vehicle in hand-held mode and apparatus thereof
A drone and handheld technology, applied in the field of handheld recovery and flying drones, to achieve the effect of omitting hardware costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
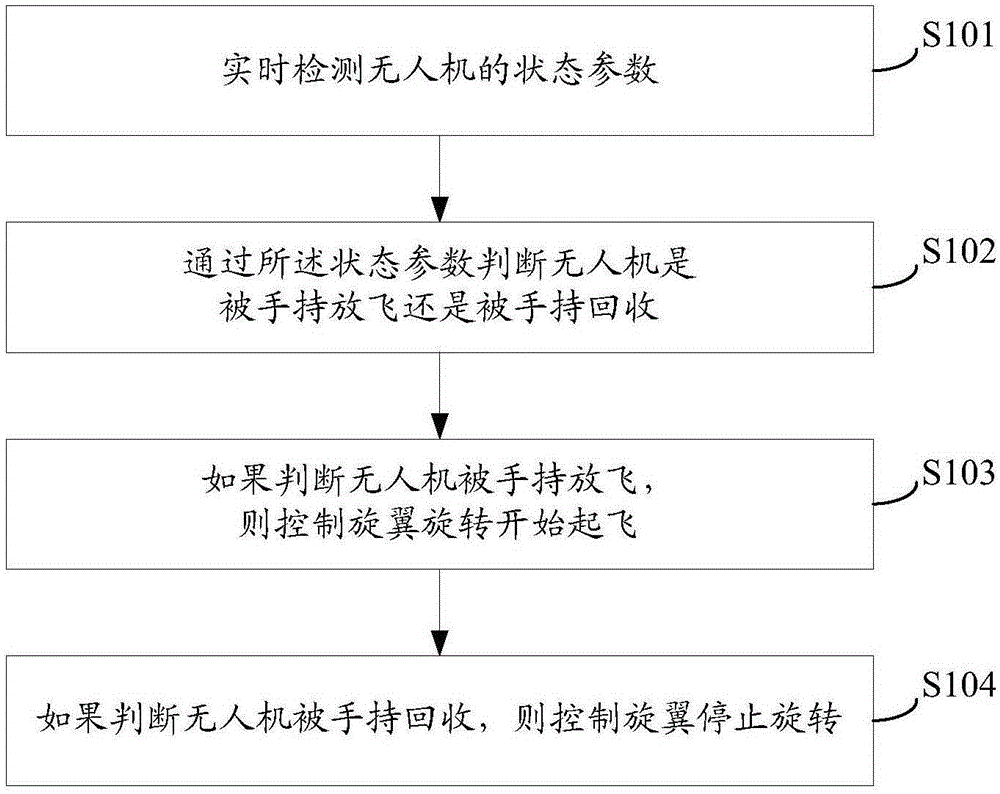
[0060] see figure 1 , which is a flow chart of Embodiment 1 of the method for hand-held recovery and release of unmanned aerial vehicles provided by the present invention.
[0061] The method for hand-held recovery and release of unmanned aerial vehicles provided by this embodiment includes:
[0062] S101: Real-time detection of state parameters of the drone;
[0063] It can be understood that the method of hand-held drone recovery provided by the present invention does not require any remote control equipment, but directly recovers the drone by hand. Therefore, the detection of the state parameters of the UAV is detected by the UAV's own sensors. For example, instruments such as accelerometers and gyroscopes are set on the drone.
[0064] S102: Determine whether the drone is released by hand or recovered by hand according to the state parameters;
[0065] The judgment that the UAV is hand-held and recovered specifically includes:
[0066] Judging whether the UAV has been...
Embodiment 2
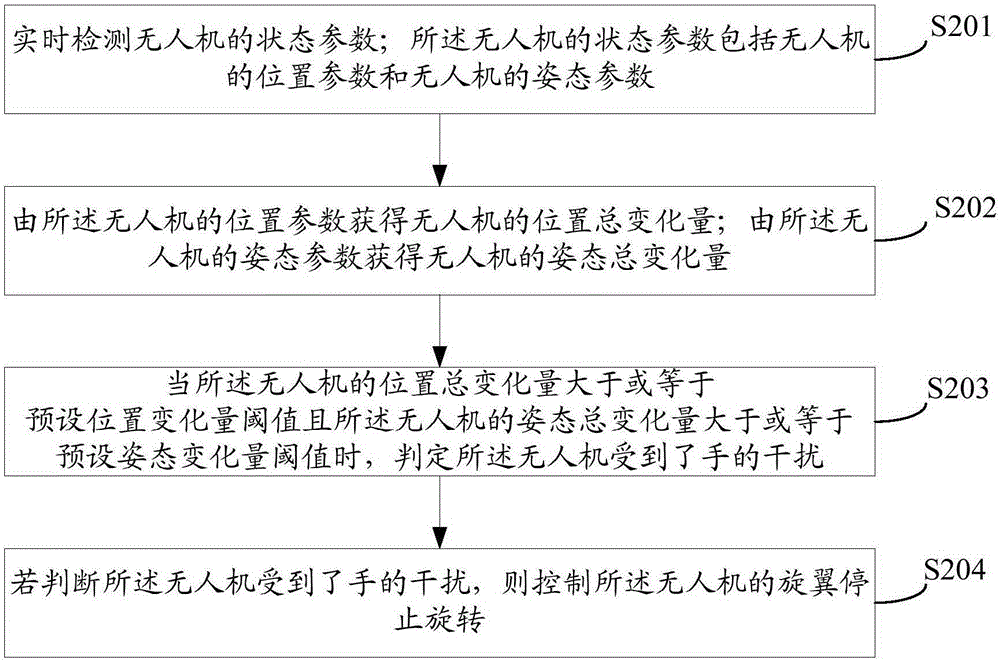
[0075] see figure 2 , which is a flow chart of the hand-held recovery drone provided by the present invention.
[0076] S201: Real-time detection of state parameters of the UAV; the state parameters of the UAV include position parameters of the UAV and attitude parameters of the UAV;
[0077] The position parameter of described unmanned aerial vehicle specifically passes the data detected by accelerometer, the unmanned aerial vehicle that is arranged on the first camera detection of unmanned aerial vehicle facing the ground side to the data of ground feature point and the unmanned aerial vehicle and sonar detector detection. Obtained by fusion of distance data on the ground;
[0078] The attitude parameters of the UAV are obtained by fusing the data detected by the accelerometer and the data detected by the gyroscope.
[0079] The state parameters of the UAV are expressed as follows: (t i ,x i ,y i ,z i ,φ i ,θ i ,ψ i ), where (x i ,y i ,z i ) is the UAV at time t...
Embodiment 3
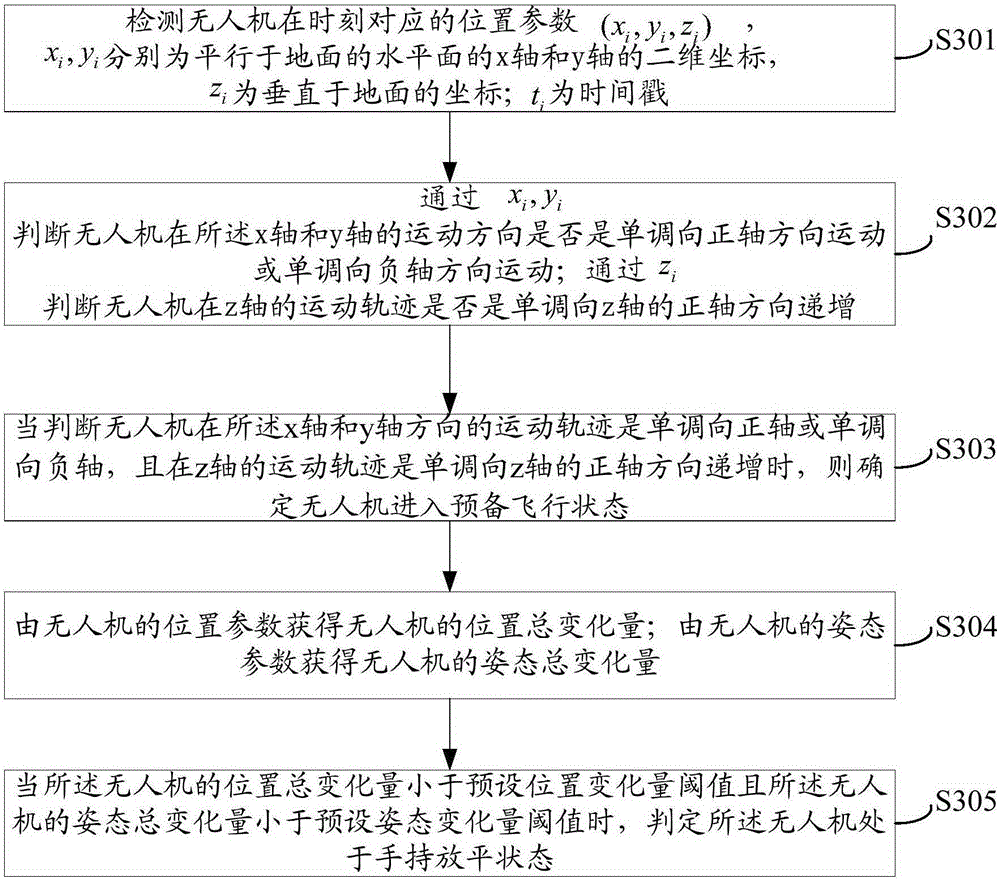
[0097] see image 3 , this figure is a flow chart of the hand-held unmanned aerial vehicle provided by the present invention.
[0098]In this embodiment, it is introduced that when it is judged that it is triggered to enter the pre-flight state by judging that the trajectory of the UAV being lifted by the hand is a preset trajectory.
[0099] When it is judged that the UAV is triggered to enter the pre-flight state, it is judged that the trajectory of the UAV being lifted by the hand is the preset trajectory, including:
[0100] S301: Detect the UAV at time t i The corresponding positional parameters (x i ,y i ,z i ), x i ,y i are the two-dimensional coordinates of the x-axis and y-axis of the horizontal plane parallel to the ground, respectively, z i is the coordinate perpendicular to the ground; t i is the timestamp;
[0101] S302: pass x i ,y i Judging whether the movement direction of the UAV on the x-axis and y-axis is monotonously moving toward the positive ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More