

Anti-swing and anti-collision control system and control method for lifting load of whirley crane
A control system and crane technology, applied in the direction of load hanging components, transportation and packaging, safety devices, etc., can solve the problems of no trajectory optimization control, lack of high efficiency, low work efficiency, etc., and achieve anti-swing and anti-collision reliability Strong, outstanding stability and high efficiency, high degree of automation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
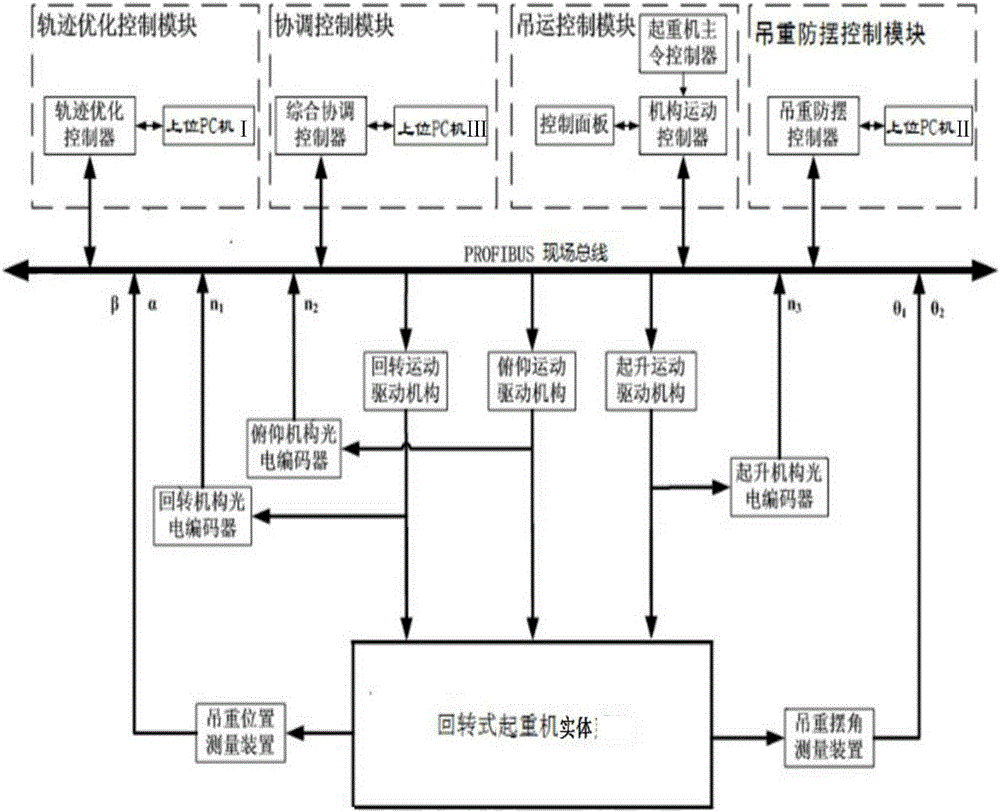
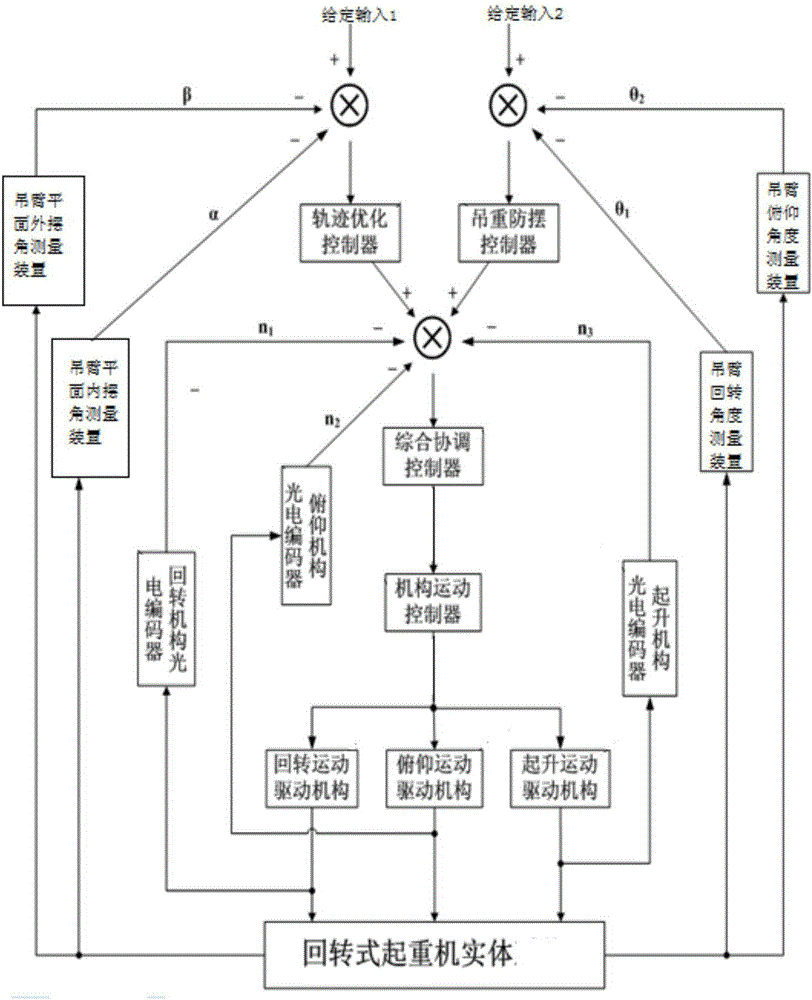
[0041] The present invention proposes a control system and control method for anti-swing and anti-collision hoisting of a rotary crane, which can simultaneously perform real-time feedback control on the trajectory of the hoisting weight during the operation of the rotary crane and the swing of the hoisting weight under the trajectory. The control system is mainly based on the hoisting control of the slewing crane, which combines trajectory optimization control and anti-swing control to form a safe, efficient and stable anti-swing and anti-collision comprehensive coordination control system; the control method of the system combines the three The organic combination of control modules, and the coordinated control module monitors the trajectory and swing of the hoisting weight in real time to ensure the safety, efficiency and stability of the crane operation process.
[0042] The invention integrates the coordinated control module, lifting control module, hoisting anti-swing cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More