Vacuum suction wall-climbing robot and using method thereof
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A wall-climbing robot and vacuum adsorption technology, which is applied in the field of wall-climbing robots, can solve problems such as low efficiency, long cycle time, and poor safety, and achieve the effect of reducing weight
Active Publication Date: 2016-01-13
BEIJING INSTITUTE OF TECHNOLOGYGY +2
View PDF3 Cites 34 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
The traditional manual method is still used for the inspection of the tunnel surface lining. The manual method has problems such as high labor intensity, long cycle, low efficiency, and poor safety.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
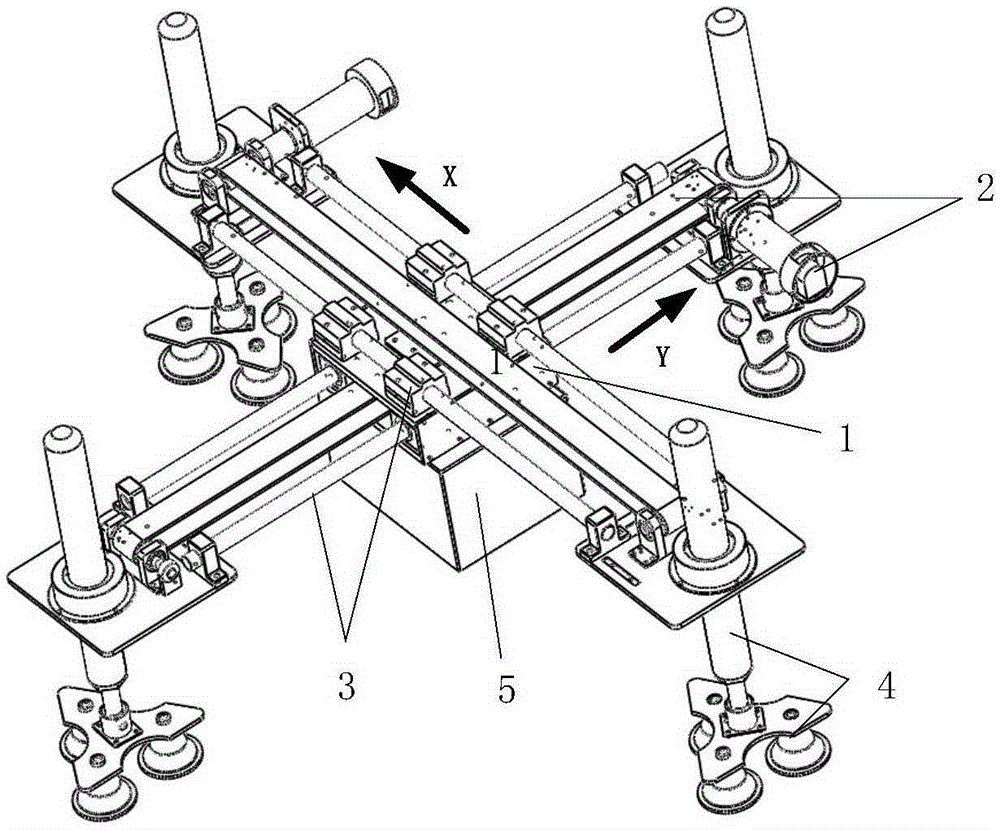
[0028] Embodiment 1: see attached figure 1 , a vacuum adsorption wall-climbing robot, which includes: a box body 1, a transmission mechanism 2, a guide mechanism 3, an adsorption mechanism 4 and a detection radar 5;
[0029] The box body 1 is divided into upper and lower layers;
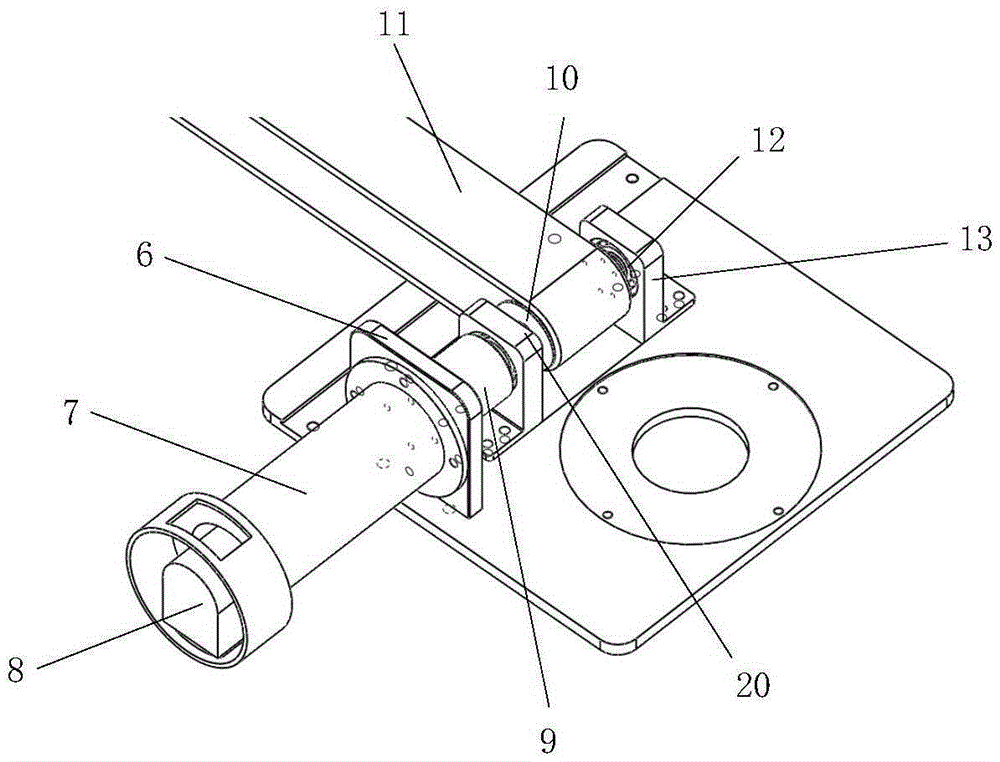
[0030] The transmission mechanism 2 is divided into two sets of synchronous belts 11 crossing in a cross shape, and each set of synchronous belts 11 is driven by the motor 8; the two sets of synchronous belts 11 are respectively installed on the upper and lower layers of the box body 1;
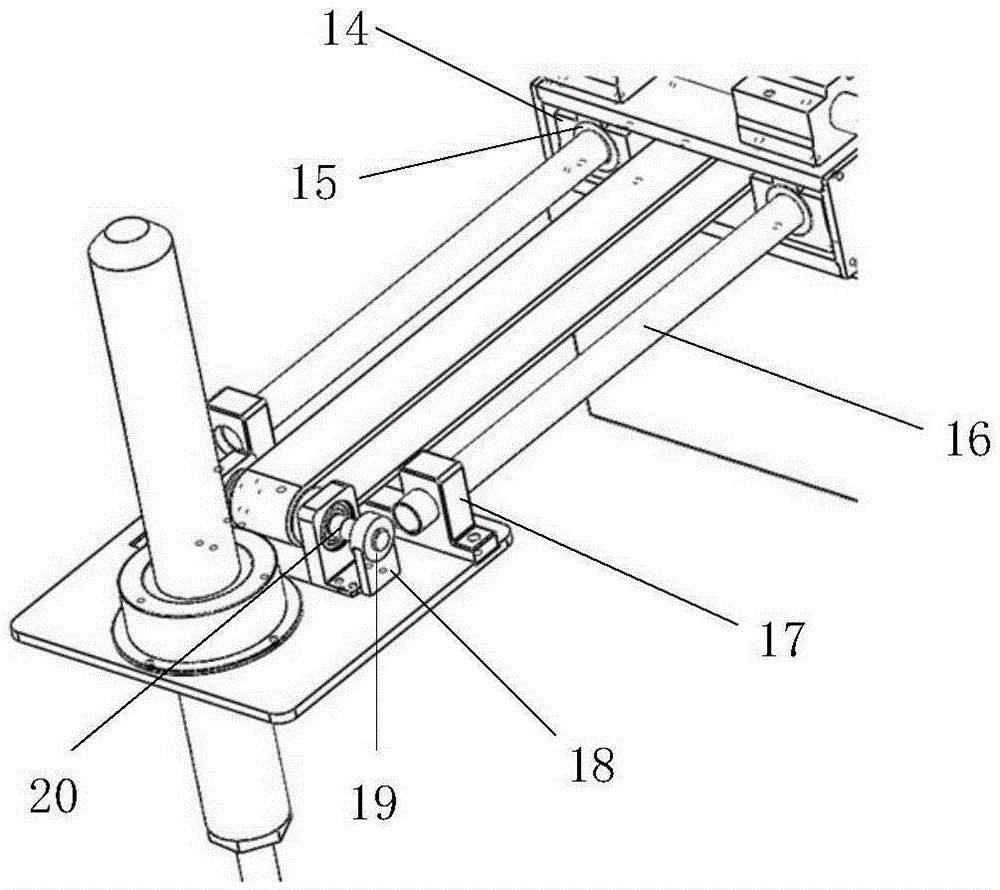
[0031] The guide mechanism 3 cooperates with the timing belt 11 in the transmission mechanism 2, and is also installed on the upper and lower layers of the box body 1;
[0032] The adsorption mechanism 4 is installed at both ends of each group of synchronous belts 11 , including: an electric push rod 21 and a suction cup group 25 below the electric push rod 21 , and the suction cup group 25 is controlled by a solen...
Embodiment 2
[0037] Embodiment 2: the use method of vacuum adsorption wall climbing robot, it is based on the vacuum adsorption wall climbing robot that is used for tunnel wall lining detection as described in embodiment 1, and its use method is as follows:
[0038] Step 1, the state of the robot is initialized, and one of the timing belts 11 is defined as the x guide rail, and the other is the y guide rail;
[0039] Step 2, make the expansion and contraction of the electric push rod 21 in the adsorption mechanism 4 be in a proper position, so that the suction cups of the suction cup groups 25 at the ends of the x and y guide rails are attached to the wall and are all in the adsorption state;
[0040] Step 3, the suction cup of the y-rail is released, and the vacuum pressure switch is detected to detect the vacuum degree in the suction cup. When the vacuum degree is less than a certain threshold, the suction cup of the y-rail is lifted to make the y-rail turn into a moving state;
[0041] ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention belongs to the technical field of intelligent robots and specifically provides a wall-climbing robot and a using method thereof. The vacuum suction wall-climbing robot comprises a box body (1), a transmission mechanism (2), guide mechanisms (3) and suction mechanisms (4). The transmission mechanism (2) comprises two synchronous belt sets (11) in square crossing. Each synchronous belt set (11) is driven by a motor (8). The suction mechanisms (4) are installed on the two ends of the synchronous belt sets (11). Each suction mechanism comprises an electric push rod (21) and a sucker group (25) arranged under the electric push rod (21), wherein the suction and the release of the sucker group (25) are controlled by a solenoid value. Through coordinated control of the motor at one end of each guide rail, the suckers and the solenoids for controlling the suction of the suckers, the motors can drive the guide rails to move linearly in certain directions; the solenoid valves for the suckers can achieve the suction and the release of the suckers, so that the robot can move continuously in the certain directions.
Description
technical field [0001] The invention belongs to the technical field of intelligent robots, and in particular relates to a wall-climbing robot and a using method thereof. Background technique [0002] Lining status detection of railway operating tunnels is of vital significance to the railway department to grasp the defects and defects of the tunnel lining status, which is directly related to the safety of traffic operation, and all domestic and foreign railway departments attach great importance to it. The traditional manual method is still used for the inspection of tunnel surface lining. The manual method has problems such as high labor intensity, long cycle, low efficiency and poor safety. With the upgrading and transformation of my country's industrial structure, manual operation no longer meets the requirements of social and environmental development, and it is necessary to find a better method to replace manual operation. Contents of the invention [0003] The objec...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More