

Motor-driven humanoid robot
A motor-driven, robotic technology, applied in the field of bionic robots, can solve problems such as limited carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
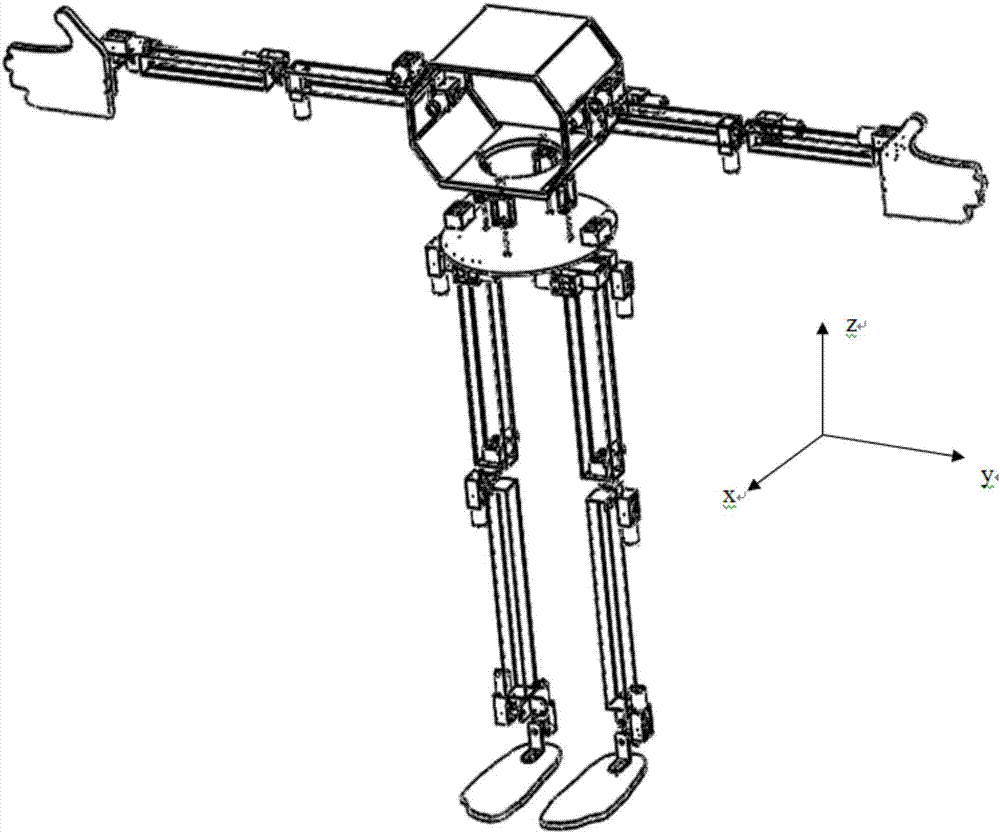
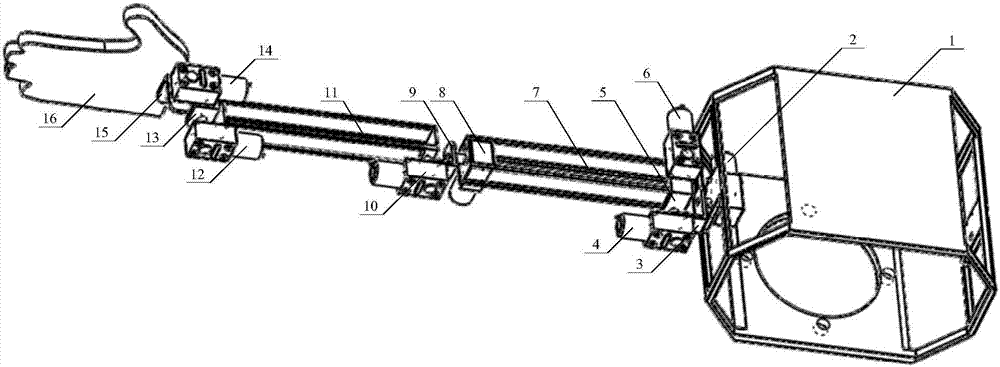
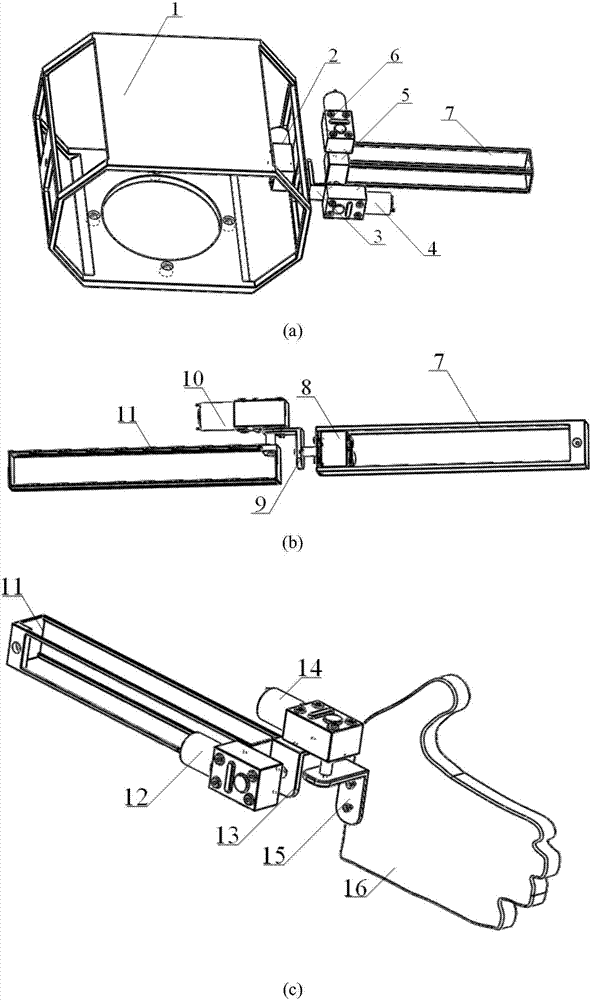
[0037] Such as Figure 1-7As shown, a new type of humanoid robot system driven by a motor includes: chest fixing part 1, worm gear reducer motor 12, shoulder connector 3, worm gear reducer motor 24, shoulder connector 25, worm gear Worm gear motor three 6, humerus 7, worm gear motor four 8, elbow joint connector 9, worm gear motor five 10, ulna 11, worm gear motor six 12, wrist joint connector one 13, worm gear motor Seven 14. Wrist joint joint 2 15, hand 16, ball joint 1 17, ball joint 2 18, ball joint 3 19, ball joint 4 20, chest joint 1 21, chest joint 2 22, chest joint 3 23 , Chest connecting piece four 24, waist fixing piece 25, screw gear motor one 26, screw gear motor two 27, screw gear motor three 28, screw gear motor four 29, worm gear motor eight 30, hip joint connection Part one 31, worm gear reducer motor nine 32, hip joint connector two 33, worm gear reducer motor ten 34, femur 35, worm gear reducer motor eleven 36, knee joint connector 37, worm gear reducer moto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More