

Spacecraft relative orbit finite time anti-saturation control method with respect to non-cooperative target
A technology for non-cooperative targets and target spacecraft, which is applied in the field of anti-saturation control for limited time relative to the orbit of spacecraft, which can solve problems such as controller saturation, system chattering, and troublesome solution process, etc., and achieve simple design and flexible response Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
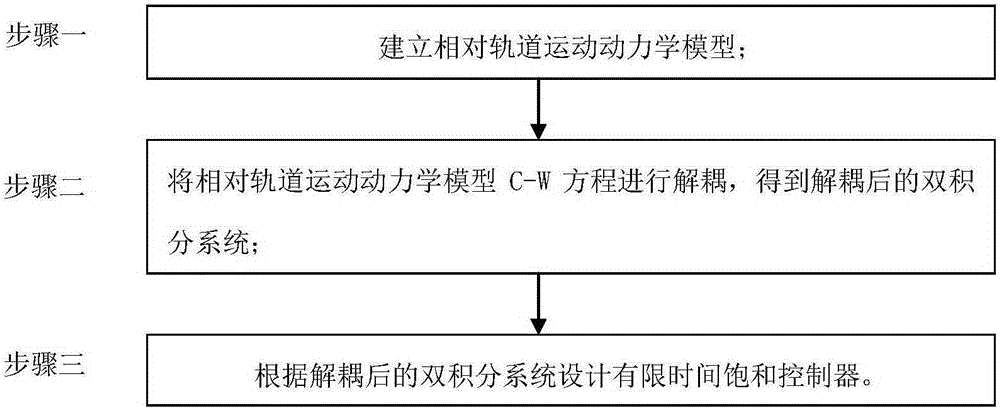
[0085] Specific implementation mode one: combine figure 1 Describe this embodiment, a spacecraft relative orbit finite time anti-saturation control method relative to a non-cooperative target, characterized in that a spacecraft relative orbit finite time anti-saturation control method relative to a non-cooperative target is specifically carried out in accordance with the following steps of:
[0086] Step 1, establishing a relative orbital motion dynamics model;
[0087] Step 2, decoupling the C-W equation of the relative orbital motion dynamics model to obtain a decoupled double integral system;
[0088] Step 3: Design a finite-time saturation controller according to the decoupled double-integral system.
specific Embodiment approach 2
[0089] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the relative orbital motion dynamics model is established in the described step one; The specific process is:
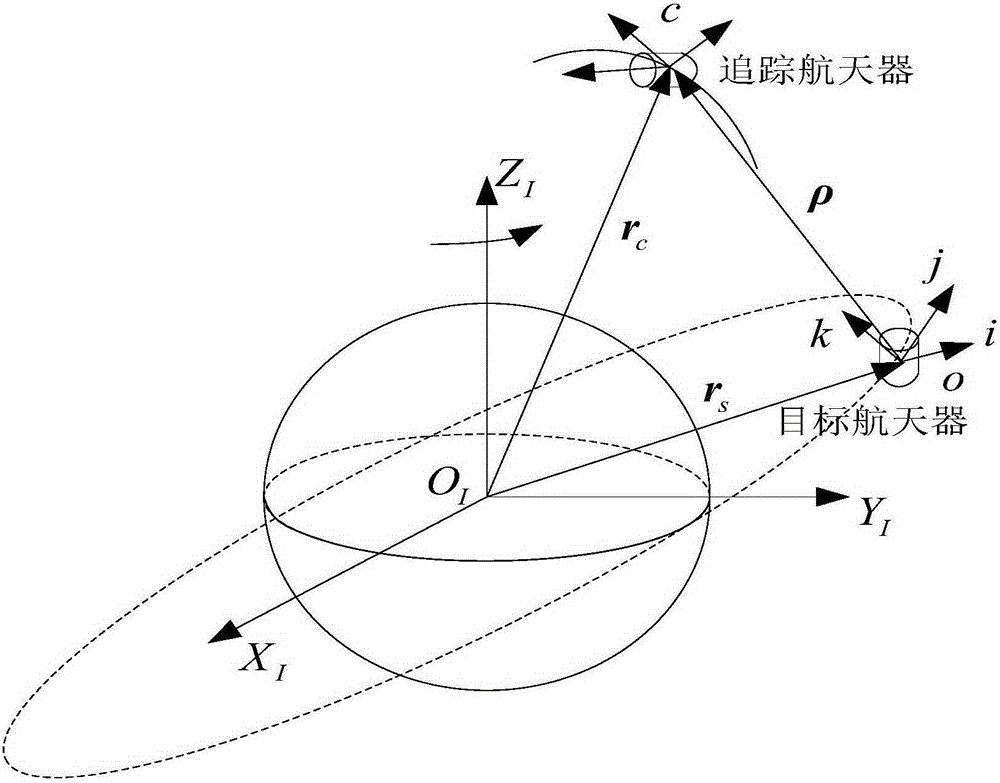
[0090] Note that the target spacecraft is o, the tracking spacecraft is c, the relative orbital motion coordinate system is the orbital coordinate system o-ijk of the target spacecraft o, and i, j, k are the three coordinate axes of the target spacecraft; the orbital coordinate system o- ijk and the earth-centered inertial coordinate system O I -X I Y I Z I relationship such as figure 2 shown;
[0091] In the absence of perturbation, the orbit of the target spacecraft is a circular orbit, that is, e=0, and the relative distance between the tracking spacecraft and the target spacecraft is relatively close, generally tens of kilometers. Taking an approximation for linearization, the spaceflight can be obtained The constant coefficient linear differential equatio...
specific Embodiment approach 3
[0094]Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the relative orbital motion dynamics model C-W equation is decoupled in said step 2, and the double integral system after decoupling is obtained; The specific process is:
[0095] The target spacecraft is in the geostationary orbit, and the average angular velocity of the target spacecraft is:
[0096] n = 2 π 24 × 60 × 60 ≈ 7.2722 × 10 - 5 r a d / s - - - ( 3 - 1 )
[0097] For the problem of orbit transfer where two spacecraft are relatively close to each o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More