

Flexible transmission upper-limb exoskeleton robot for wearing
An exoskeleton robot and flexible transmission technology, applied in the field of robotics, can solve the problems of low stiffness, inability to be safe and reliable, and poor load-bearing capacity, and achieve the effects of high stiffness, wide application range and strong bearing capacity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
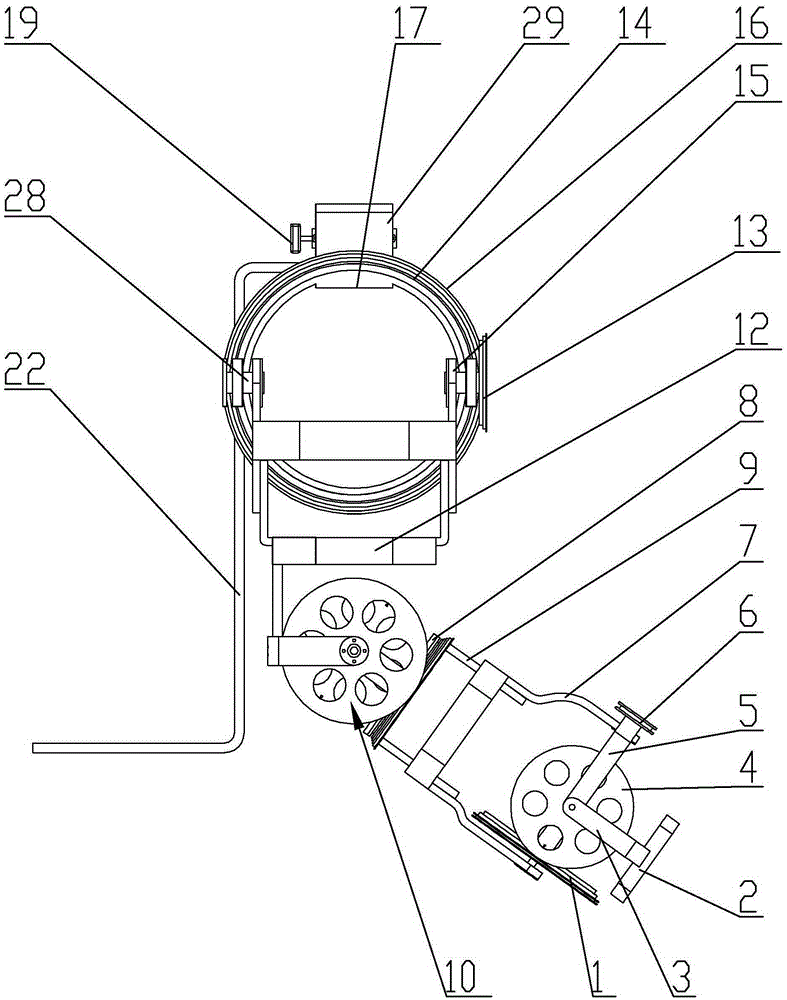
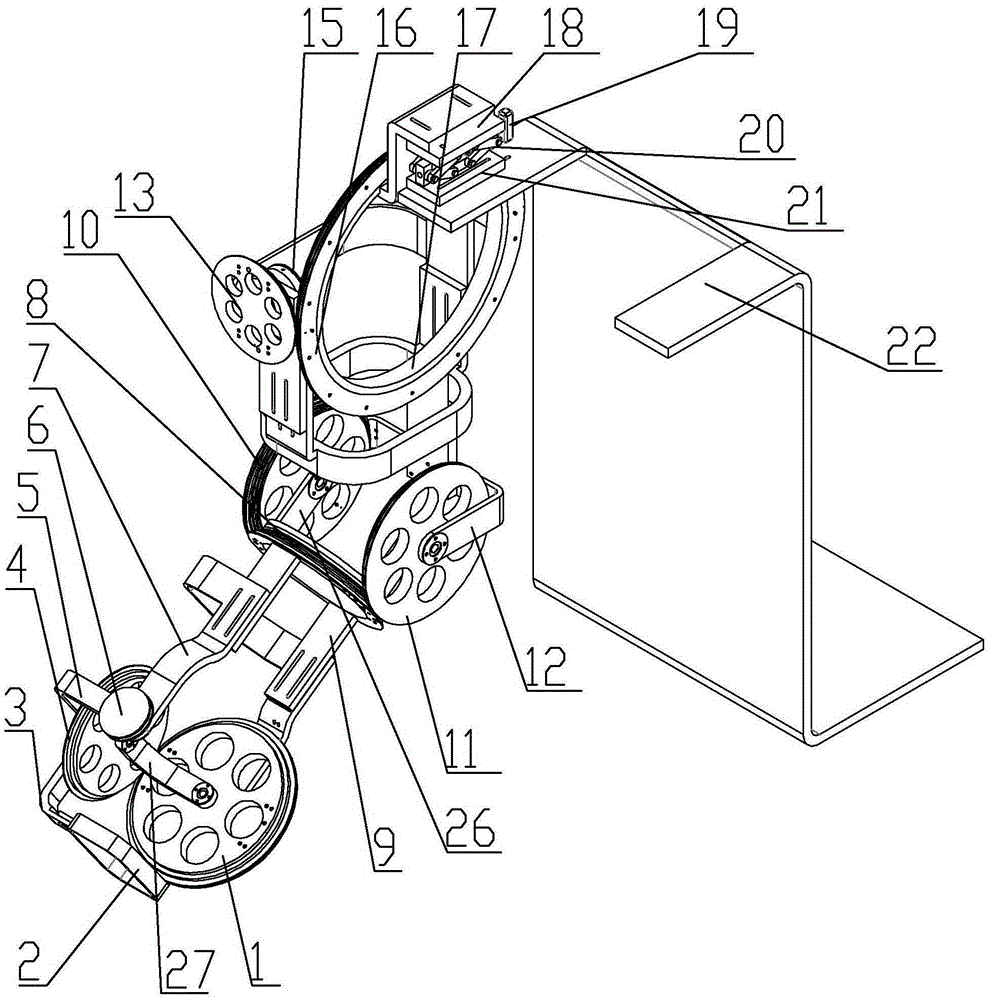
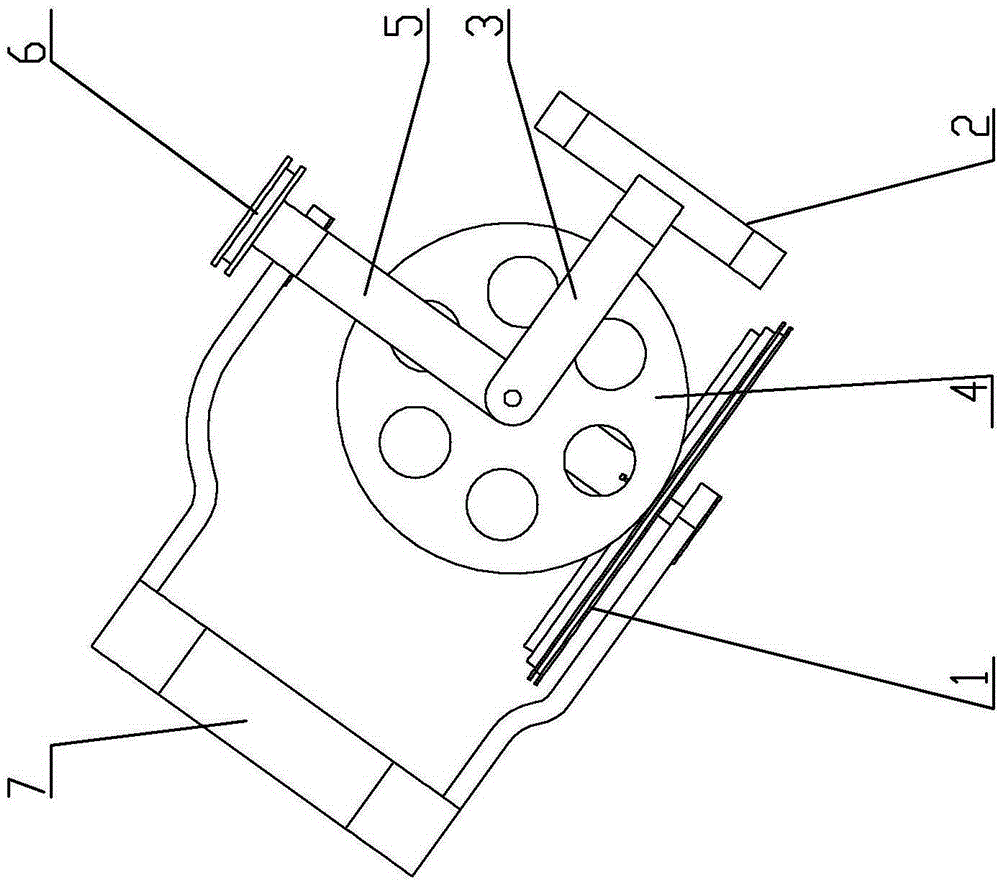
[0016] Specific implementation mode one: combine Figure 1-Figure 10 Describe this embodiment, a flexible transmission upper limb exoskeleton robot for wearing described in this embodiment, it includes a wrist joint mechanism, an elbow joint mechanism, a shoulder joint mechanism and a back plate 22, and the wrist joint mechanism includes a wrist joint driving fixed wheel 1. Human palm fixing part 2, wrist joint driving wheel connecting part 3, wrist joint planetary wheel 4, wrist joint driving rod 5, wrist joint driving rod power input wheel 6, exoskeleton forearm 7, 'L' shaped connecting part 27 and two A wrist joint wire rope 23, the elbow joint mechanism includes an elbow joint planetary wheel 8, an elbow joint planetary wheel support frame 9, a first elbow joint drive fixed wheel 10, a second elbow joint drive fixed wheel 11, an elbow joint connected upper arm frame 12,' U'-shaped frame body 26 and four elbow joint wire ropes 24, the shoulder joint mechanism comprises shou...
specific Embodiment approach 2
[0021] Specific implementation mode two: combination Figure 1-Figure 2 Describe this embodiment, the flexible transmission upper extremity exoskeleton robot described in this embodiment, the jack assembly includes a scissor jack upper platform 18, a scissor jack adjuster 19, a scissor jack support bar 20 and The scissor jack lower platform 21, the shoulder joint driving fixed wheel connecting plate 29 is a 'Z' shaped plate, the scissor jack upper platform 18 is fixedly installed on the lower end surface of the shoulder joint driving fixed wheel connecting plate 29 top plate, the scissor jack The lower platform 21 is arranged under the scissor jack upper platform 18, the scissor jack lower platform 21 and the scissor jack upper platform 18 are connected by the scissor jack support bar 20, and the scissor jack adjustment part 19 is arranged on the scissor jack support bar On the member 20, the lower platform 21 of the scissor jack is fixedly installed on the backboard 22, and t...
specific Embodiment approach 3
[0023] Specific implementation mode three: combination Figure 9 and Figure 10 Describe this embodiment, the flexible transmission upper limb exoskeleton robot described in this embodiment, two grooves are processed on the upper end surface of the bottom plate of the fixed wheel connecting plate 29 of the shoulder joint drive, and the shoulder joint drive The inner ring surface of the fixed wheel 16 is processed with an annular groove, and the inner ring surface of the shoulder joint driver 14 is processed with an annular groove, and the others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More