

Horizontal joint mechanical arm
A technology of mechanical arms and horizontal joints, applied in the directions of manipulators, claw arms, manufacturing tools, etc., can solve the problems of low precision and high maintenance costs, and achieve the effect of reducing warranty costs and simplifying complex structural configurations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
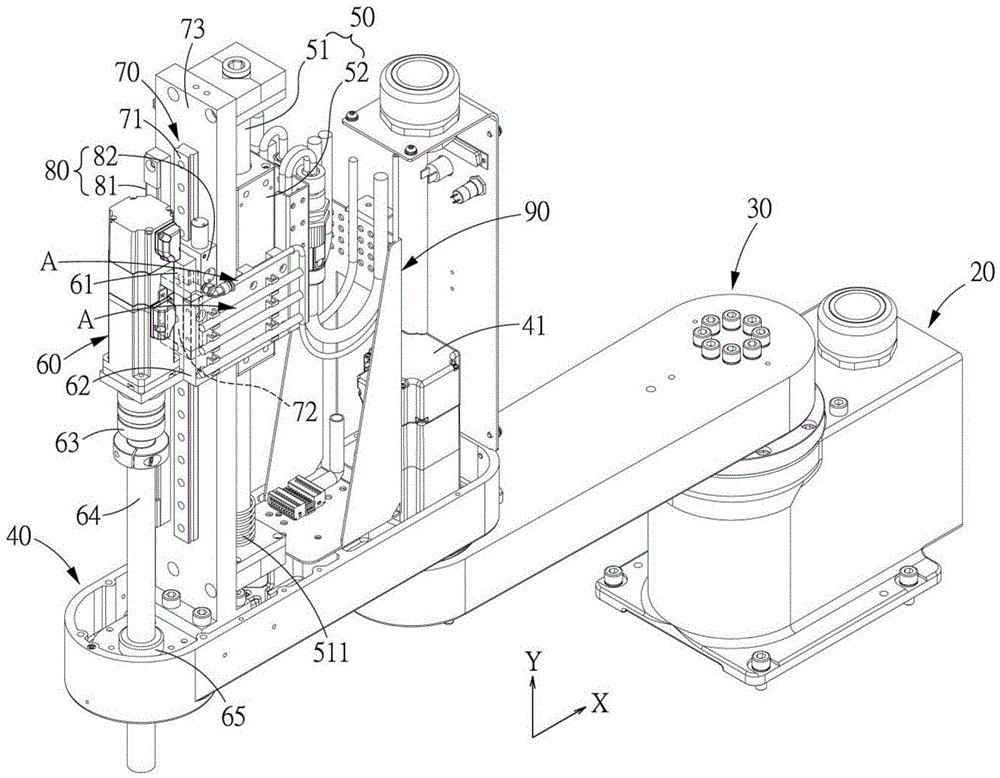
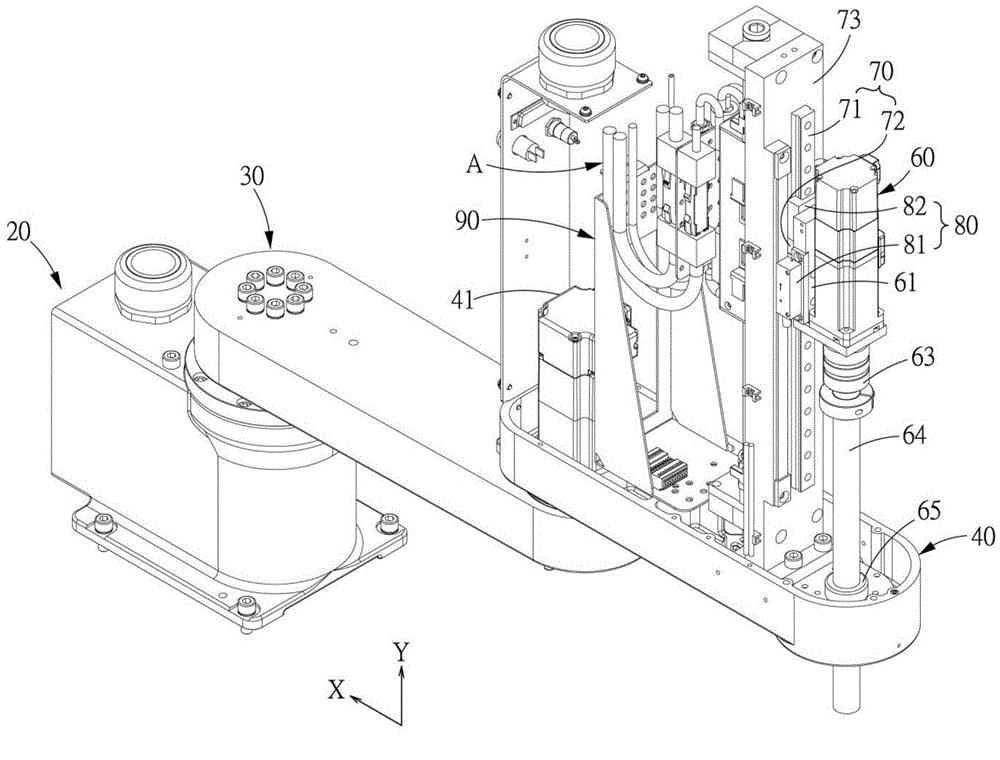
[0051] A preferred embodiment of a horizontally articulated mechanical arm of the present invention is Figures 2 to 6 shown, including:
[0052] A pedestal 20 is provided for fixed arrangement on the ground or a fixed plane, and the pedestal 20 is fixedly provided with a first shaft motor 21, and the first shaft motor 21 drives a first drive shaft 211 to rotate, and the first drive shaft 211 extends along a vertical direction Y, and the vertical direction Y is defined as the horizontal direction X. The first driving shaft 211 is combined with a first reduction mechanism 22, so that the first shaft motor 21 passes through the first The reduction mechanism 22 outputs power.
[0053] A first arm 30, one end is combined with the first reduction mechanism 22 on the first shaft motor 21, so that the first arm 30 is combined with the first shaft motor 21, then the first arm 30 can be controlled by the first shaft motor 21. The first axis motor 21 drives the rotation, and makes the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More