

Self-driving car lane changing control method based on monocular vision
An automatic driving and monocular vision technology, applied in the direction of control devices, driver input parameters, vehicle components, etc., can solve the problems of large errors, inability to provide real-time feedback, poor real-time performance, etc., and achieve anthropomorphic and lane-changing applications The effect of stable and reliable process and reduced complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
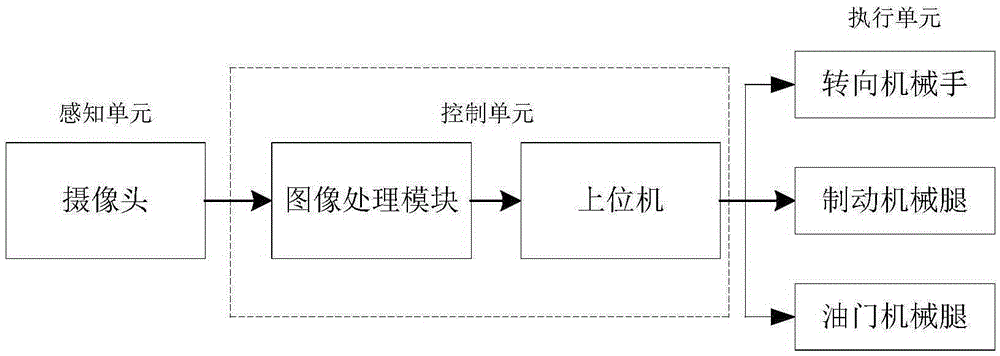
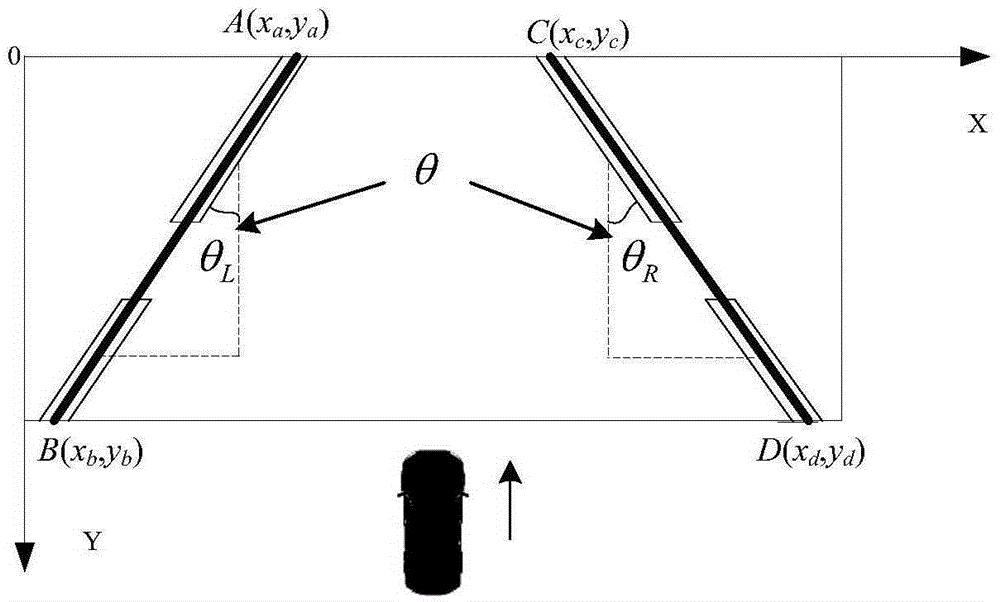
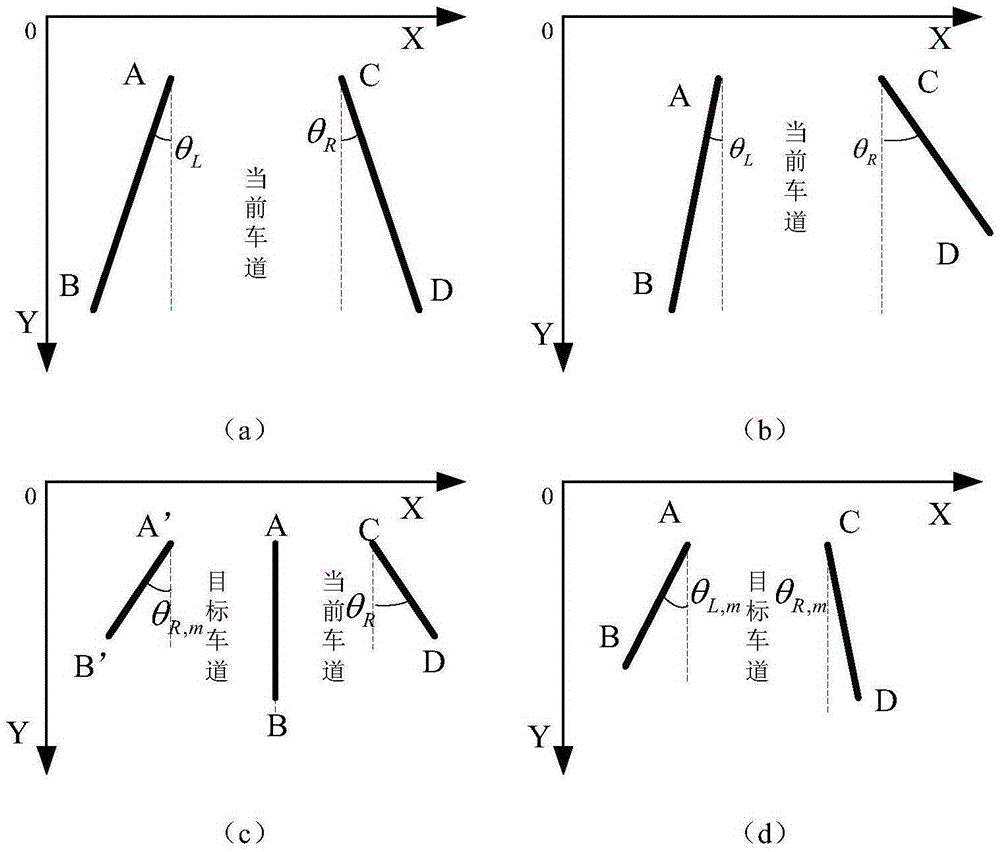
[0032] The lane-changing control method of the self-driving car of the present invention refers to the method for changing lanes of a manually driven car. When the driver drives the car to change lanes, his eyes mainly look at the own lane in front of the vehicle and the target lane. The dividing line between two lanes (one lane line) is an important reference in the process of changing lanes. The lane-changing process of the vehicle is mainly divided into three stages: approaching the dividing line, riding on the dividing line, and moving away from the dividing line and adjusting the attitude. In these three stages, the slope of the dividing line will change with the position of the vehicle, showing a certain law of change . Therefore, the self-driving car recognizes the lane line information through the monocular camera, establishes the optimal tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More