

Energy-saving walking leg mechanism simulating ostrich hindlimb movement function characteristic
A motion function and hindlimb technology, applied in the field of robots, can solve the problems of undiscovered structure and simplicity, and achieve the effects of compact overall structure, saving manufacturing cost and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
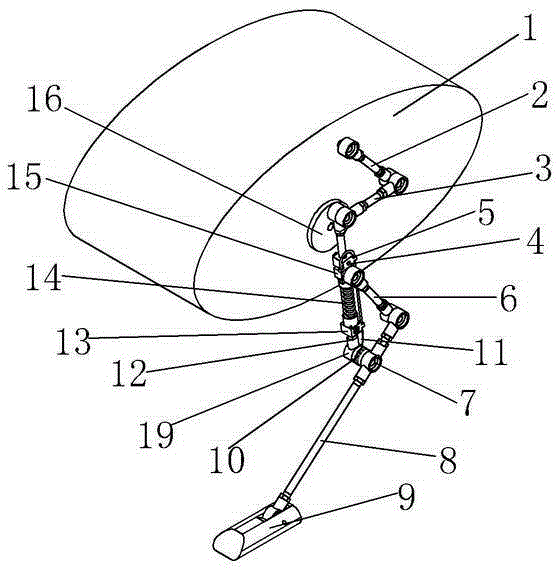
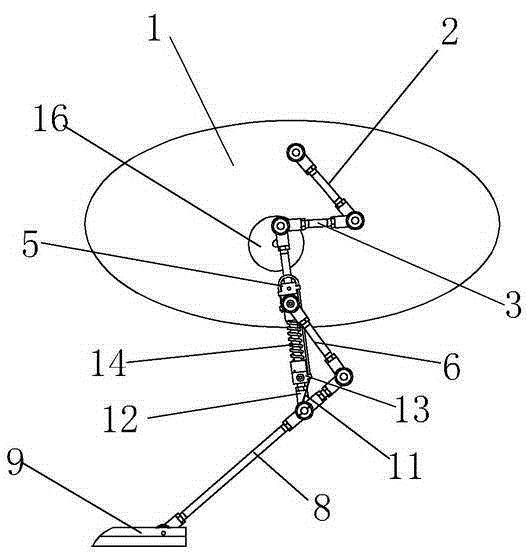
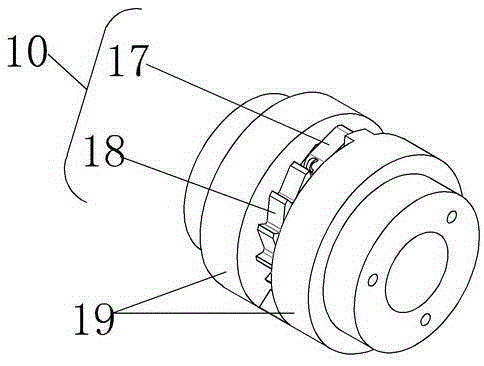
[0015] see figure 1 , figure 2 , image 3 with Figure 4 Shown, the present invention comprises frame 1, crank linkage mechanism, rebound mechanism and toe 9; Crank linkage mechanism comprises crank 16, thigh 3 and rocking bar 2; Rebound mechanism comprises fixed slider 5, connecting rod 6 , metatarsal bone 8, brake wire 11, shank 12, block 13, spring 14, movable slider 15, ratchet 17, ratchet 18 and angle limiter 19; Toe 9 is made of flexible energy storage material.
[0016] Such as figure 2 As shown, the fixed slider 5 in the rebound mechanism is fixed on the frame 1, and the shank 12 and the fixed slider 5 form a sliding pair; The other end of 14 is in contact with the movable slider 15, and the movable slider 15 can slide on the calf 12; the movable slider 15 is connected with the metatarsal bone 8 through the connecting rod 6; the metatarsal bone 8 and the lower leg 12 are hinged through the angle limiter 19, and the ratchet mechanism 10 includes The ratchet 17 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More