Permanent magnet chain wall climbing robot with air rods for buffering
A technology of a wall-climbing robot and an air rod, which is applied in the field of wall-climbing robots, can solve the problems of no water-cooled wall thickness measuring equipment, inconvenient maintenance and repair of the water-cooled wall, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
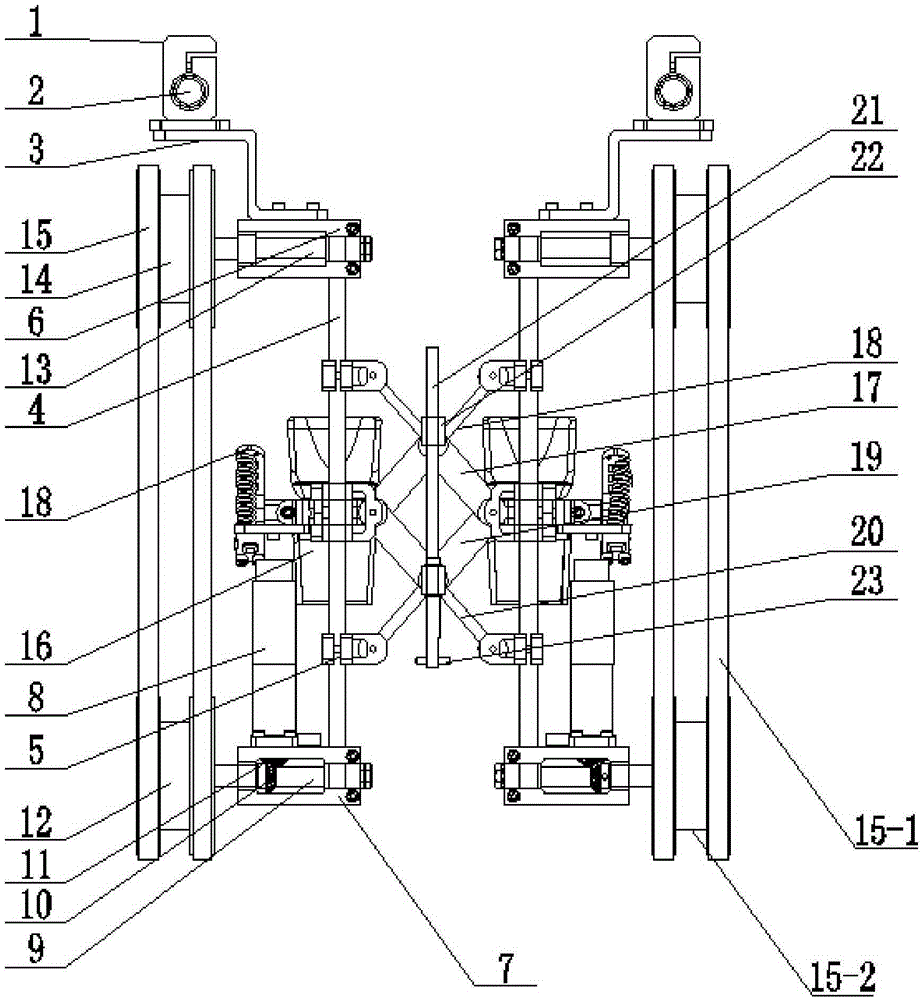
[0022] Specific implementation mode one: combine Figure 1-Figure 4 Describe this embodiment, this embodiment is a kind of permanent magnet chain wall-climbing robot with air rod buffering, it comprises the first wall-climbing leg, the second wall-climbing leg and elastic buffer connector, the first wall-climbing leg and the second wall-climbing leg The wall-climbing legs are radially arranged left and right, and the first wall-climbing leg and the second wall-climbing leg are connected by elastic buffer connectors.
[0023] The structure of the first wall-climbing leg and the second wall-climbing leg is the same, and the first wall-climbing leg includes a probe 1, a probe sleeve 2, a probe bracket 3, at least one slide rail 4, a plurality of slide sleeves 5, a first slide rail Frame 6, second slide rail frame 7, DC servo motor 8, driving shaft 9, driving bevel gear 11, driven bevel gear 10, driving sprocket 12, driven shaft 13, driven sprocket 14, permanent magnet chain assem...
specific Embodiment approach 2
[0028] Specific implementation mode two: combination figure 1 Describe this embodiment, it also includes a manual adjustment part in this embodiment, and the manual adjustment part is installed at the upper end of the intersection of the first air rod 17 and the second air rod 18 and the intersection of the third air rod 19 and the fourth air rod 20 . This setting adds a new way to the adjustment of the buffer, especially suitable for wall climbing when the distance between the two pipes is fixed. The distance between the climbing wall is unstable when climbing the wall quickly. Other compositions and connections are the same as those in the third embodiment.
specific Embodiment approach 3
[0029] Specific implementation mode three: combination figure 1 Describe this embodiment, the manual adjusting member of this embodiment includes screw rod 21 and two nuts 22, and two nuts 22 are respectively fixedly installed on the first gas rod 17 and the intersection point of second gas rod 18 and the third gas rod 19 and the third gas rod 19 and At the crossing point of the fourth air rod 20, the screw rod 21 is a screw rod with opposite screw threads at both ends, and the screw rod 21 is screwed on the two nuts 22 to drive the two nuts 22 to move toward each other or oppositely at the same time. With such arrangement, the distance between the first wall-climbing leg and the second wall-climbing leg can be quickly adjusted through two lead screws with different rotation directions. Other compositions and connections are the same as in Embodiment 4.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More