Wall climbing robot with permanent magnetic chains and elastic steel sheets
A wall-climbing robot and elastic steel sheet technology, applied in the field of wall-climbing robots, can solve problems such as inflexible movement, and achieve the effects of flexible movement, stable wall climbing, and good adsorption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
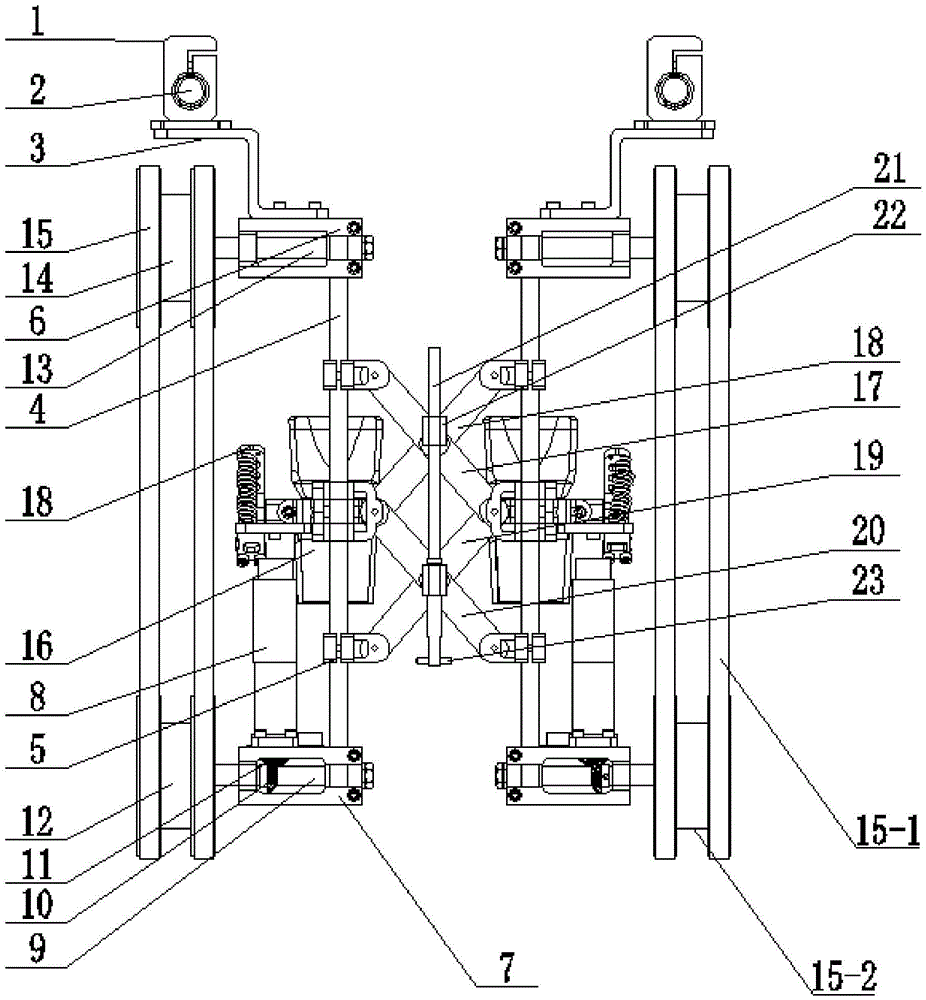
[0021] Specific implementation mode one: combine Figure 1-Figure 4 Describe this embodiment, this embodiment is a permanent magnet chain wall climbing robot with elastic steel sheets, it includes a first wall climbing leg, a second wall climbing leg and an elastic buffer connector, the first wall climbing leg and the second wall climbing leg The wall-climbing legs are radially arranged left and right, and the first wall-climbing leg and the second wall-climbing leg are connected by elastic buffer connectors.
[0022] The structure of the first wall-climbing leg and the second wall-climbing leg is the same, and the first wall-climbing leg includes a probe 1, a probe sleeve 2, a probe bracket 3, at least one slide rail 4, a plurality of slide sleeves 5, a first slide rail Frame 6, second slide rail frame 7, DC servo motor 8, driving shaft 9, driving bevel gear 11, driven bevel gear 10, driving sprocket 12, driven shaft 13, driven sprocket 14, permanent magnet chain assembly 15...
specific Embodiment approach 2
[0023] Specific implementation mode two: combination figure 1 Describe this embodiment, the elastic buffer connector of this embodiment includes a first steel sheet 17 and a second steel sheet 18, the first steel sheet 17 and the second steel sheet 18 are arranged crosswise, the first steel sheet 17 and the second steel sheet The two ends of 18 are respectively hinged with a sliding sleeve 5, and the intersection of the first steel sheet 17 and the second steel sheet 18 is hinged. So set, through the hinge of the first steel sheet 17 and the second steel sheet 18, when the wall-climbing robot travels the distance between the two pipelines becomes larger or smaller, the first wall-climbing leg and the second wall-climbing leg gradually In the state of contraction or gradual expansion, the first steel sheet 17 and the second steel sheet 18 automatically adapt to the change of the distance between the two pipes to produce elastic changes, preventing the invariance caused by the r...
specific Embodiment approach 3
[0024] Specific implementation mode three: combination figure 1 Describe this embodiment, the elastic buffer connector of this embodiment also includes a third steel sheet 19 and a fourth steel sheet 20, the third steel sheet 19 and the fourth steel sheet 20 are arranged crosswise, the third steel sheet 19 and the fourth steel sheet The two ends of the sheet 20 are respectively hinged with a sliding sleeve 5, and the intersection of the third steel sheet 19 and the fourth steel sheet 20 is hinged, and one end of the first steel sheet 17 and one end of the third steel sheet 19 share a sliding sleeve 5 , One end of the second steel sheet 18 and one end of the fourth steel sheet 20 share a sliding sleeve 5 . Set in this way, the second specific embodiment is a set of elastic buffers. On the basis of a set of elastic buffers, this embodiment adds a set of elastic buffers to make the buffer more stable, resistant to rapid wall climbing and encountering between two pipe walls. In t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More