

A four-degree-of-freedom coaxial output mechanism
A technology with coaxial output and degrees of freedom, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large inertia of moving parts, low stiffness and precision of the whole machine, limited dynamic characteristics, etc., and achieve a small moment of inertia. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to further illustrate the content of the invention, the characteristic effect of the present invention, the present invention will be further described below in conjunction with the accompanying drawings:
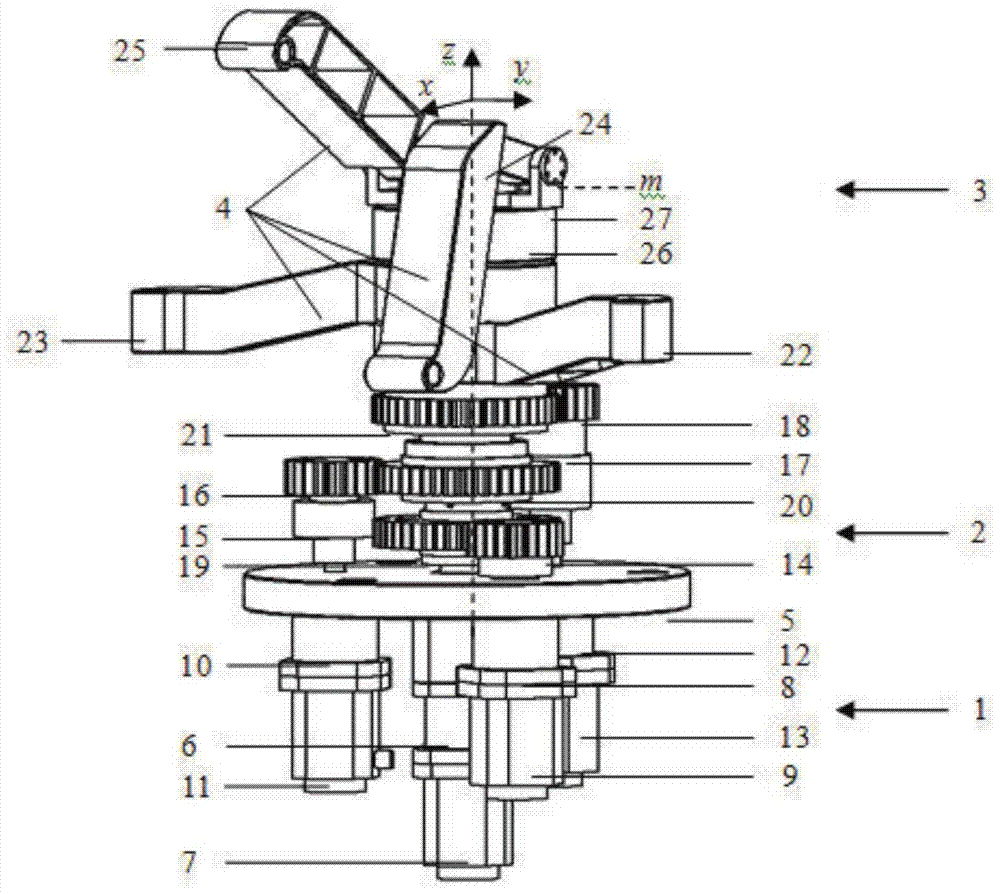
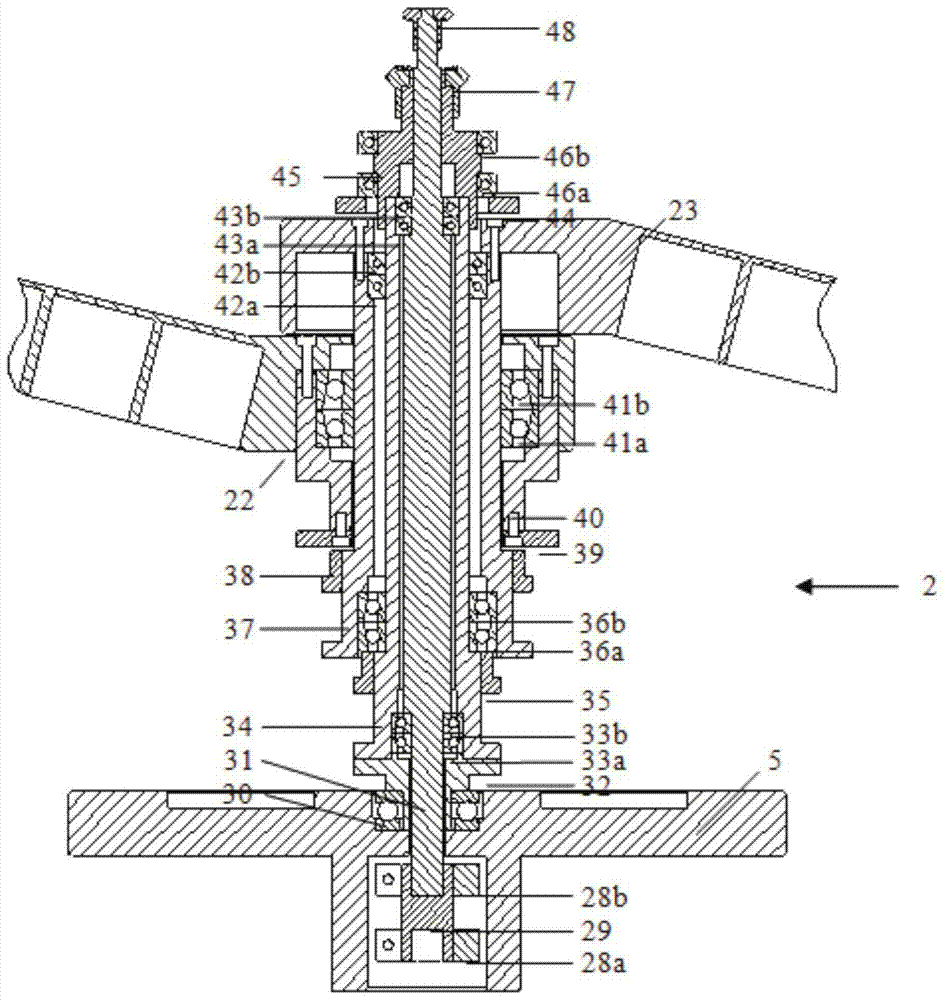
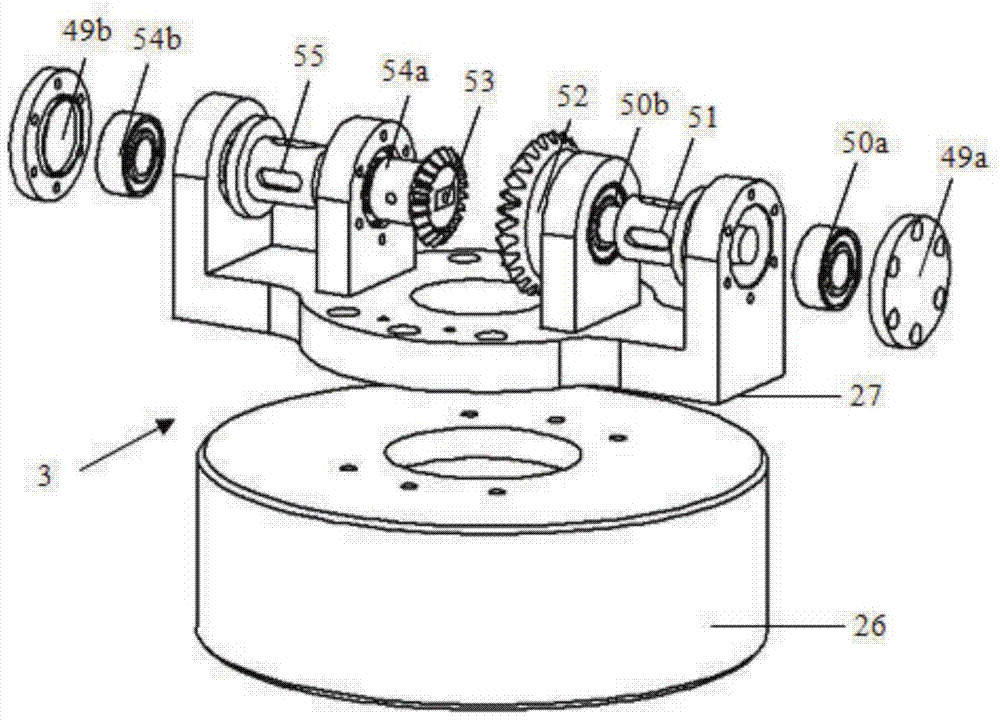
[0021] like Figure 1~3 As shown, a four-degree-of-freedom coaxial output mechanism includes a drive part 1 , a transmission part 2 , a follower part 3 and an execution part 4 .
[0022] like Figure 1~2 As shown, the driving part 1 includes a base 5, a first reducer 6, a first motor 7, a second reducer 8, a second motor 9, a third reducer 10, a third motor 11, a fourth reducer 12, The fourth motor 13, the first pinion 14, the first connecting shaft 15, the second pinion 16, the second connecting shaft 17, the third pinion 18, the first large gear 19, the second large gear 20 and the third large Gear 21, the input end of the first reducer 6 is fixedly connected to the output shaft of the first motor 7, the output end of the first reducer 6 is fixedly conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More