

Direct yaw moment control method for electric vehicle stability based on high-order sliding mode
A yaw moment, high-order sliding mode technology, applied in control devices, vehicle components, driver input parameters, etc., can solve problems such as oversteering or understeering, and achieve fast dynamic response speed and high steady-state tracking accuracy. , the effect of improving fastness and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
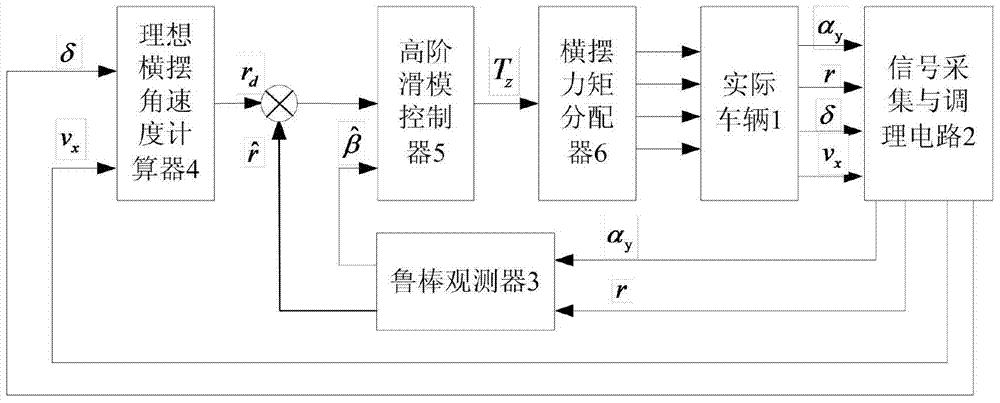
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
[0021] Such as figure 1 As shown, the high-order sliding mode-based direct yaw moment control method for electric vehicle stability in the present invention consists of a signal acquisition and conditioning circuit 2, a robust observer 3, an ideal yaw rate calculator 4, and a high-order sliding mode controller 5 And the yaw moment distributor 6 is realized. The input of the robust observer 3 based on active control is the steering wheel angle and the longitudinal vehicle speed of the actual vehicle 1 detected by the signal acquisition and conditioning circuit 2, and the active control strategy is designed. The change rate of the unknown parameters is obtained by adaptive estimation. By modifying The design parameters can adjust the convergence speed of the observer to track the state of the system, so that the state estimation can re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More