

A guidance method for automatic tracking of ground targets for unmanned aerial vehicles
A ground target and automatic tracking technology, which is applied in the direction of finding target control, etc., can solve the problem of heavy computer calculation load, and achieve the effect of reducing the calculation burden and simplifying the structure of the sensor.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
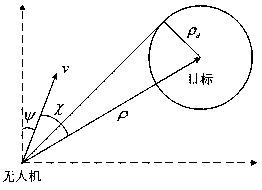
[0024] 1. The UAV flight control system is composed of an inner loop (stabilizing loop) and an outer loop (guidance loop). In the present invention, the inner loop has been designed and can respond well to the guidance instructions given by the outer loop, and track By default, the speed of the drone is higher than the target speed when moving the target. Ideally, a UAV performing a fixed-distance tracking task should maintain a fixed height and a turning radius to make a circular motion around the tracked object, so usually only the two-dimensional guidance problem at a fixed height can be considered. Note that ρ is the relative distance between the UAV and the target, ρ∈[0,∞], χ is the line of sight angle, χ∈[0,2π) and counterclockwise is positive, ρ d is the expected distance, v is the speed of the UAV, such as figure 1 shown.
[0025] Investigate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More