

Unmanned aerial vehicle cooperative search method for moving object with perception capability
A moving target and multi-UAV technology, applied in the field of computer simulation and method optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
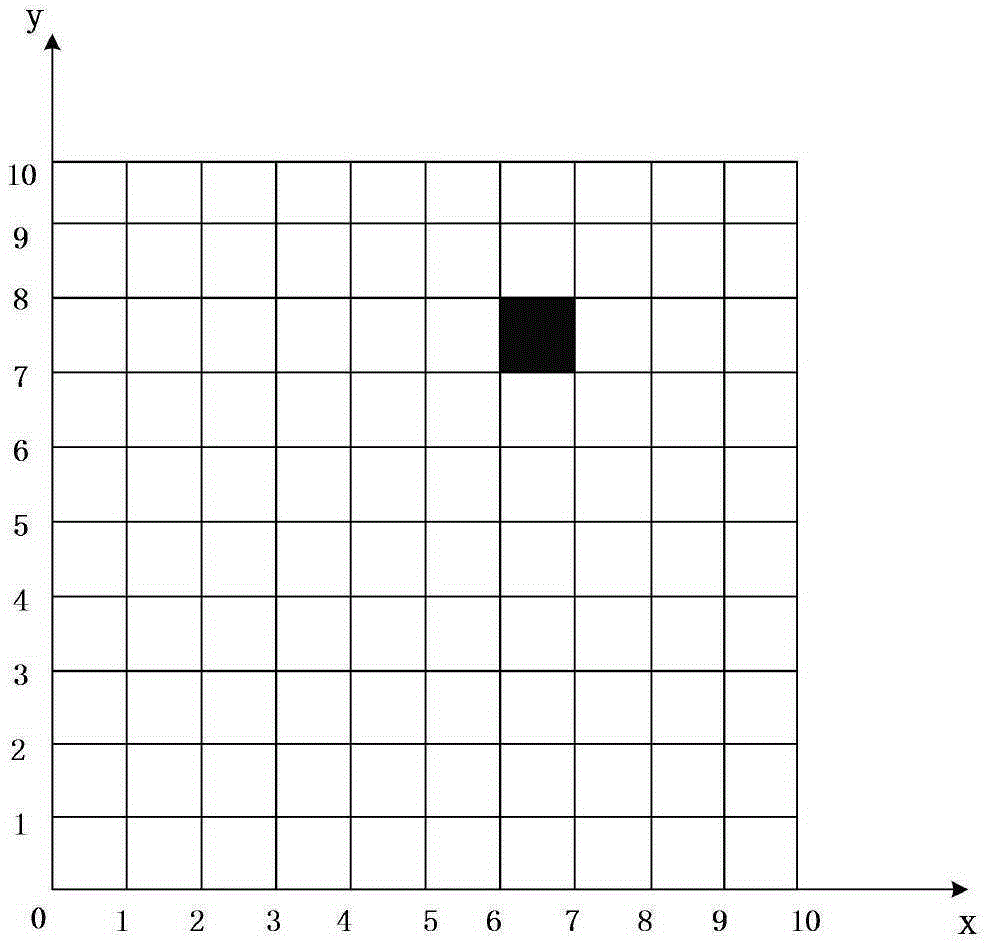
[0068] In this embodiment, a multi-UAV cooperative search method for moving targets with perception capabilities is applied to any grid in the search environment E in the search area E where multi-UAVs cooperatively search for multi-moving targets Denoted as (m,n); m∈{1,2,...,M}, n∈{1,2,...,N}; the side length of each grid is c;
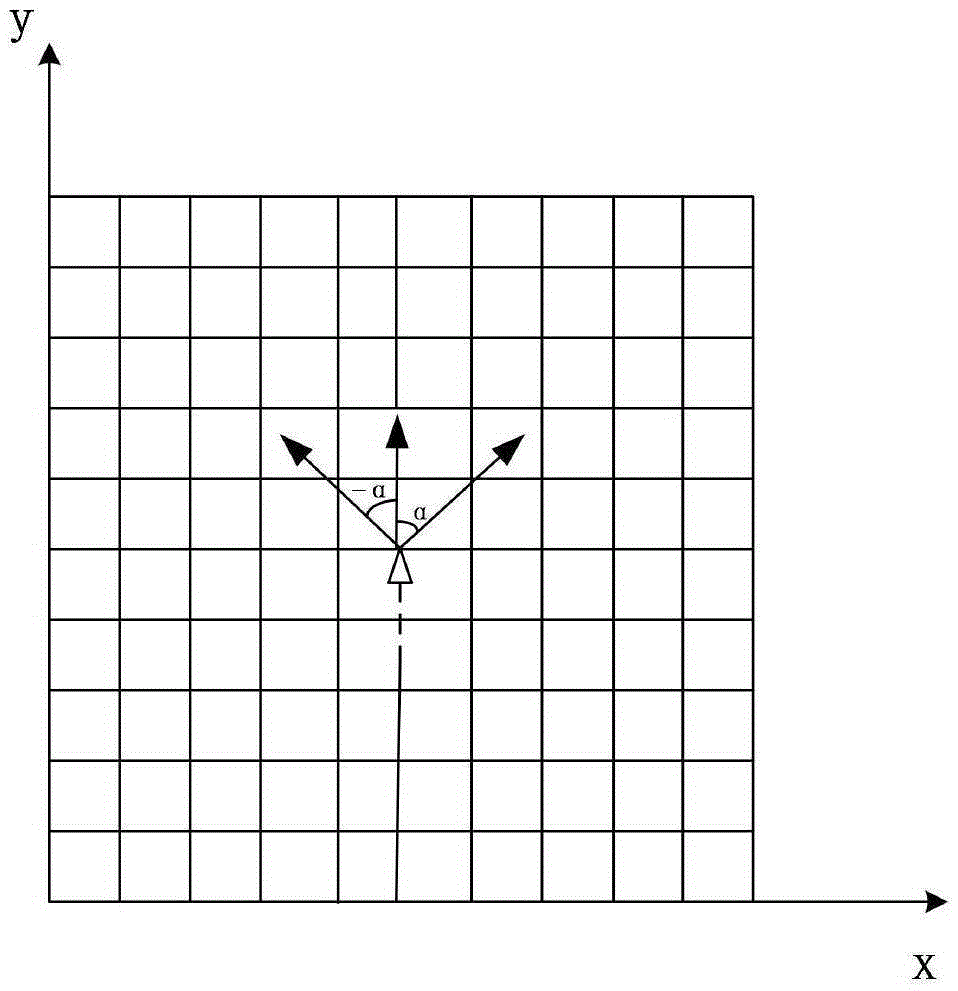
[0069] Suppose there are N in the search area E V UAVs of the same type; the flight speed of any UAV is v, and the maximum deflection angle is α;
[0070] Suppose there are N in the search area E T There can be at most one moving target in a discrete square grid; N V , N T Both are positive integers; UAVs use their own airborne sensors to search for moving targets;
[0071] Suppose there are N in the search environment E B a fixed detection device;
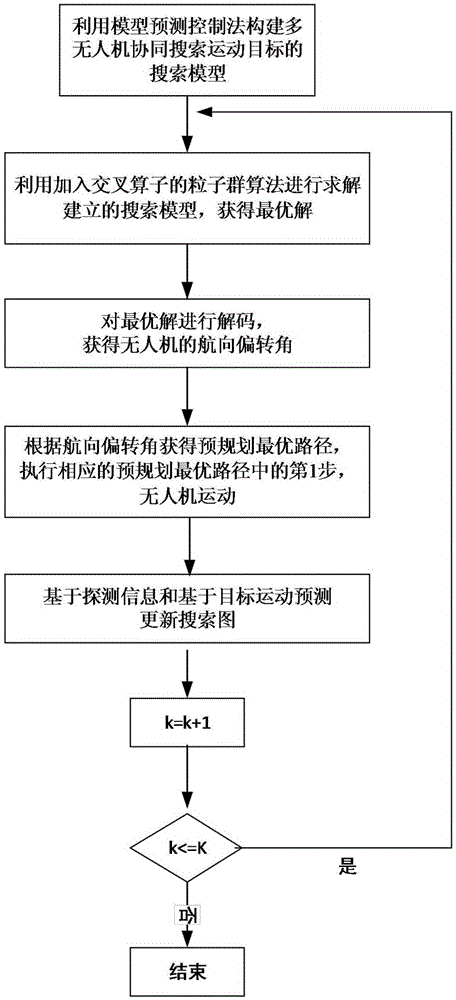
[0072] Define K to represent the total time step of multi-UAV search, k to represent the kth time step, k=1,2,...,K;
[0073] define P mn (k) represents the existence probability of the moving ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More