

A road scene-oriented 3D semantic map construction and storage method
A semantic map and three-dimensional technology, which is applied in the construction and storage of three-dimensional semantic maps for road scenes, can solve the problems of large loads and massive calculations in vehicle systems, reduce occupation, meet the needs of rapid construction and storage, and optimize map updates way effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific examples.
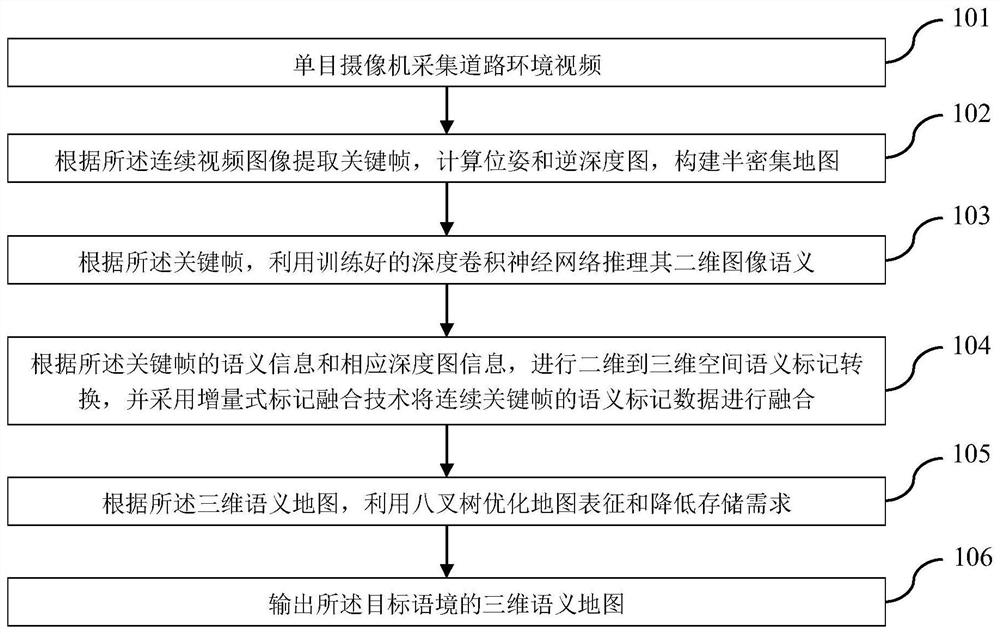
[0023] figure 1 It is a schematic diagram of the implementation process of the present invention, and the specific steps are shown by reference numerals 101-106.
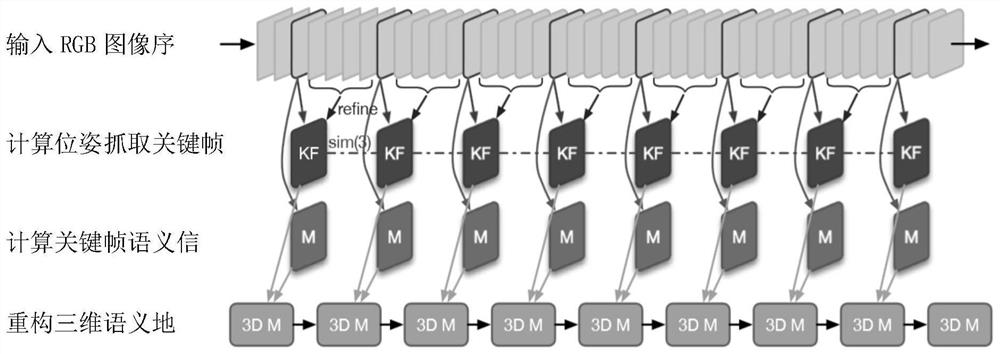
[0024] Use the on-board camera to directly shoot the road scene video during driving, and use the visual synchronization positioning and composition technology, that is, VSLAM, to complete the camera pose estimation and key frame capture, and perform image pixel depth estimation on the key frame, such as figure 2 As shown; 3D map reconstruction can be realized by using the obtained key frames and image depth estimation. For the key frame acquired at a certain time t, using the trained two-dimensional semantic segmentation model based on deep convolutional neural network, the original color image of the current key frame is used as input to infer its image semantic information, that is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More