

Exoskeleton type upper limb rehabilitation robot with man-machine interaction kinetic model
A dynamic model, rehabilitation robot technology, applied in passive exercise equipment, manipulators, manufacturing tools, etc., can solve the problems of inconsistent EMG signal strength, increase detection cost, and it is difficult to reflect the real situation of each joint.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
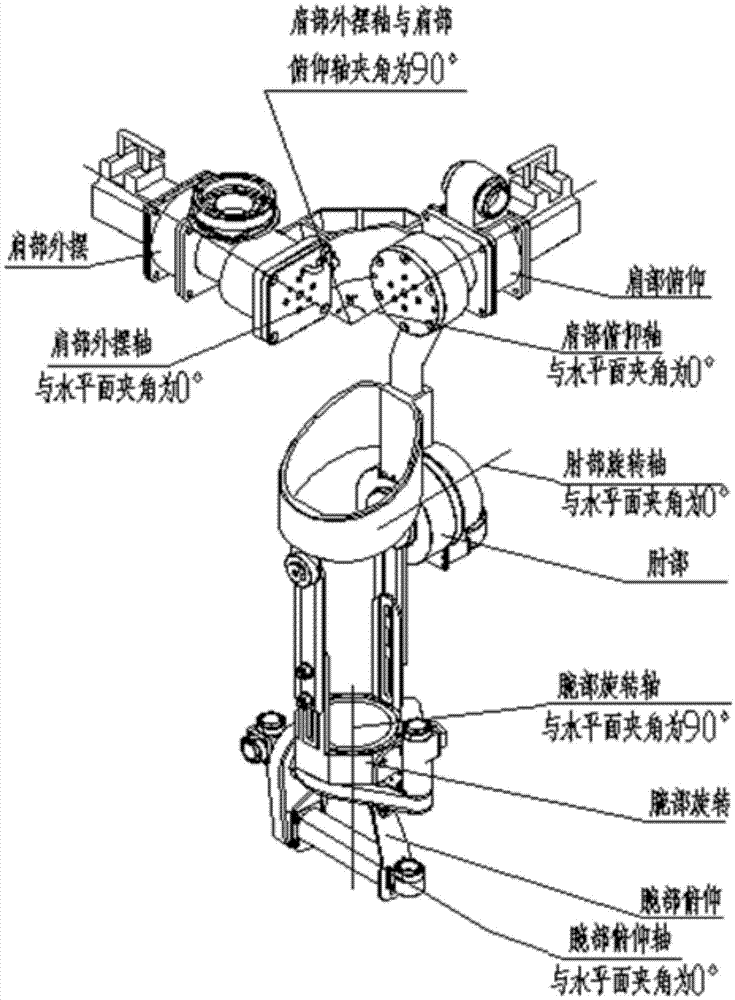
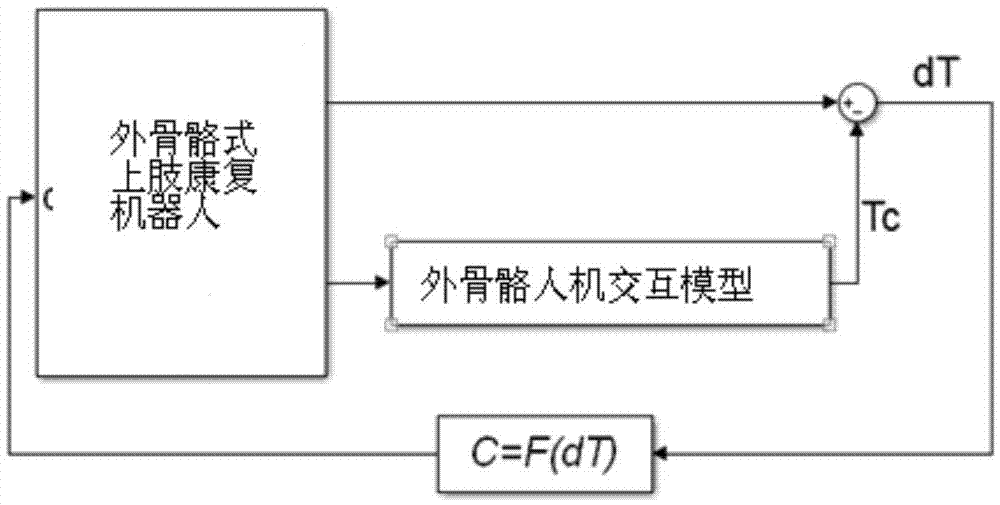
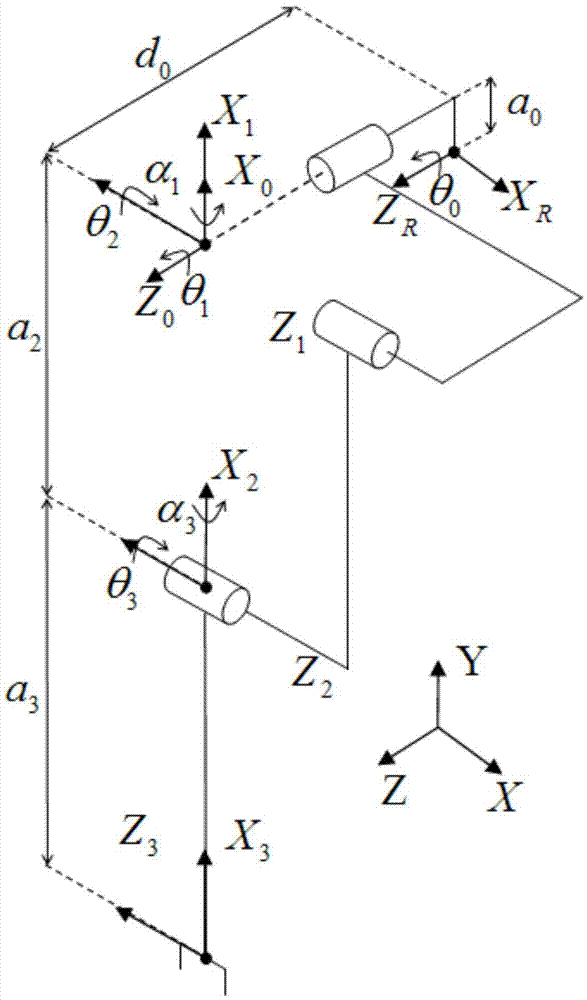
[0171] An exoskeleton-type upper limb rehabilitation robot with a dynamic model of human-computer interaction, its key points are briefly described as follows: First, in rehabilitation training, the human upper limb is regarded as a two-link robotic arm with three degrees of freedom, in which: the shoulder Two degrees of freedom, one degree of freedom at the elbow; then its dynamic model is combined with the dynamic model of the exoskeleton rehabilitation robot to form the human-computer interaction dynamic model of the exoskeleton upper limb rehabilitation robot; among them: the joint angle and moment of the human upper limb It is obtained through indirect measurement by angle and torque sensors installed on the exoskeleton movable joints; the human-computer interaction dynamic model of the exoskeleton-type upper limb rehabilitation robot is specifically a human-computer interaction model with 19 parameters based on the pseudo-inertia matrix and the Lagrangian algorithm. Inter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More