

Variable load upper limb power-assisted exoskeleton based on double quadrilateral gravity balance principle
A gravity balance, double quadrilateral technology, applied in the field of medical equipment, can solve the problems of large volume and mass, reduced reliability, complex circuit, etc., and achieve the effect of small volume and mass, less number of motors, and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
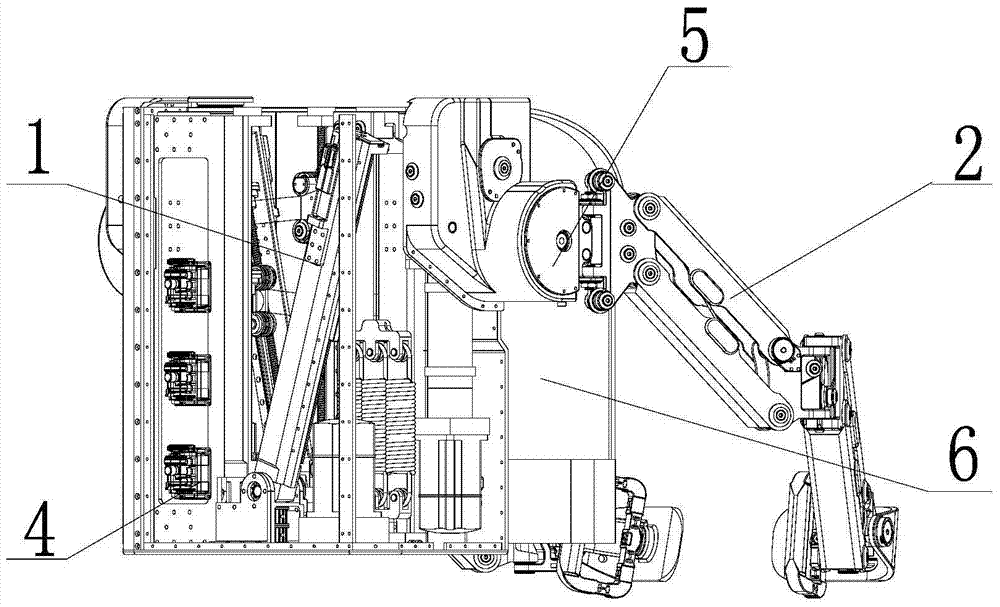
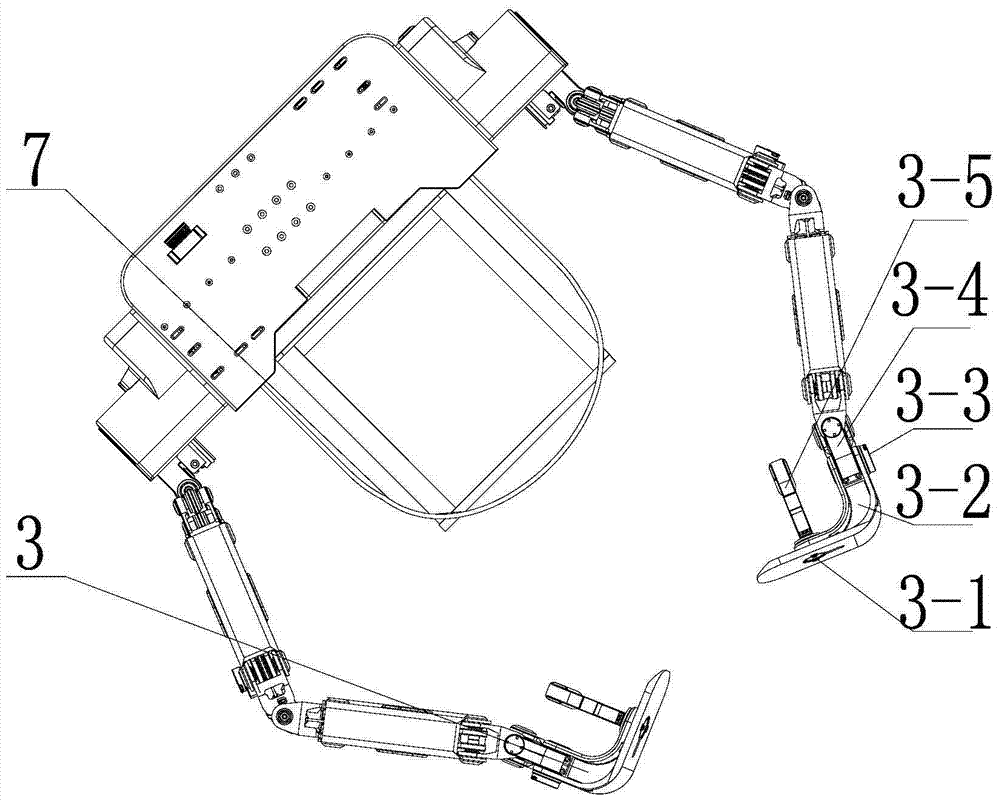
[0016] Specific implementation mode one: combine figure 1 with figure 2 Describe this embodiment. The variable-load upper limb power-assisted exoskeleton based on the principle of double quadrilateral gravity balance in this embodiment includes two spring energy storage mechanisms 1, a back 6, a strap 7, two arms 2, two wrists 3, and two Turntable 5 and a plurality of magnetic sensors 4, one end of each arm 2 is respectively connected to the upper part of the corresponding side of the back 6 through a turntable 5, the other end of each arm 2 is connected to a wrist 3 respectively, and the strap 7 is arranged on the back 6, a plurality of magnetic sensors 4 are sequentially arranged on the back of the back 6 from top to bottom, and two spring energy storage mechanisms 1 are installed on the back 6, and each spring energy storage mechanism 1 is connected to a corresponding arm 2.
[0017] The magnetic sensor in this embodiment is the Whistle magnetic sensor D, which can sense ...
specific Embodiment approach 2
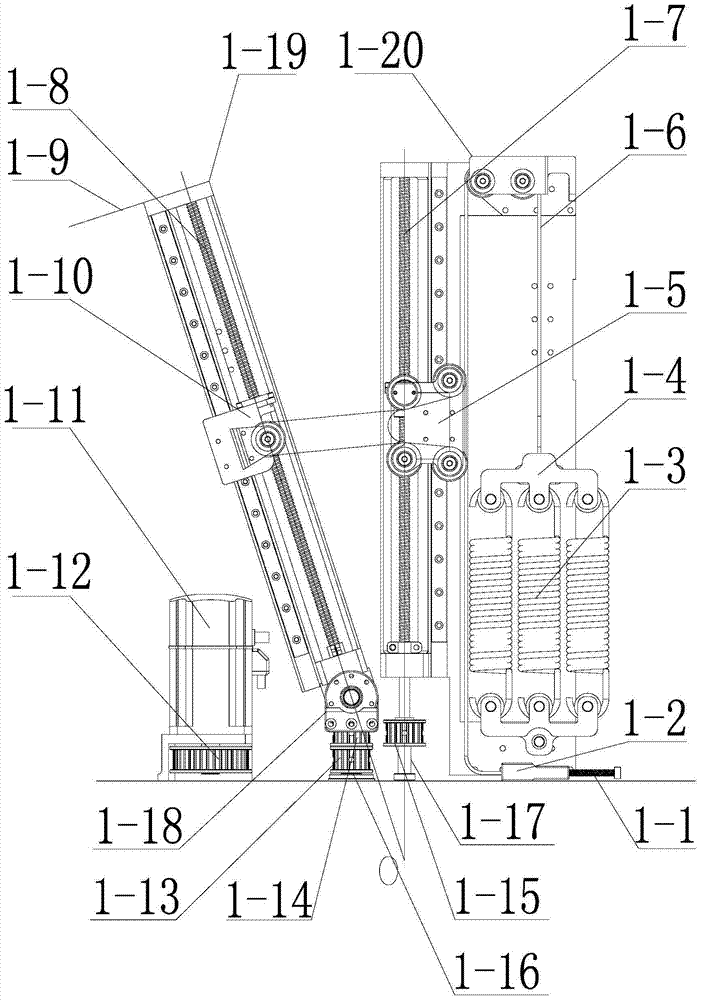
[0019] Specific implementation mode two: combination image 3 Describe this embodiment. Each spring energy storage mechanism 1 of the variable load upper limb power-assisted exoskeleton described in this embodiment includes a screw 1-1, a first wire rope compression sleeve 1-2, and a first connecting plate. 1-4, right slider 1-5, first wire rope 1-6, right screw mandrel 1-7, left screw mandrel 1-8, external wire rope 1-9, left slider 1-10, motor 1-11, The first pulley 1-12, the second pulley 1-13, the third pulley 1-14, the fourth pulley 1-15, the first shaft 1-16, the second shaft 1-17, the bearing seat 1- 18, the first mounting plate 1-19, the second mounting plate 1-20 and three springs 1-3,
[0020]Motor 1-11, the first mounting plate 1-19, the second mounting plate 1-20 are arranged successively from left to right, and a plurality of springs 1-3 are arranged side by side in parallel, and the lower end of each spring 1-3 is all connected with the second mounting plate. T...
specific Embodiment approach 3
[0022] Specific implementation mode three: combination Figure 4 Describe this embodiment, the arm 2 of the variable load upper limb power-assisted exoskeleton based on the double quadrilateral gravity balance principle in this embodiment includes a second connecting plate 2-1, a first connecting rod 2-2, and a second connecting rod 2-3 , the third connecting plate 2-4, the fourth connecting rod 2-5, the fifth connecting rod 2-6, the fourth connecting plate 2-7, the fifth connecting plate 2-8, the second steel wire rope 2-9, the second Wire rope gland 2-10, the third wire rope gland 2-11 and the third wire rope 2-12,
[0023] The first connecting rod 2-2, the second connecting rod 2-3, the second connecting plate 2-1, and the fifth connecting plate 2-8 form an upper parallelogram mechanism, the third connecting rod 2-5, the fourth connecting rod 2 -6. The third connecting plate 2-4 and the fourth connecting plate 2-7 form a lower parallelogram mechanism, the fourth connecting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More