

A Fast Correction Method for Inertial Navigation Errors Used in Airborne Communication in Motion
A technology of communication and error in motion, applied in the field of navigation, can solve the problems of low data rate and poor precision of MEMS inertial navigation, etc., to achieve the effect of ensuring control accuracy, reducing attitude drift, and ensuring long-term navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
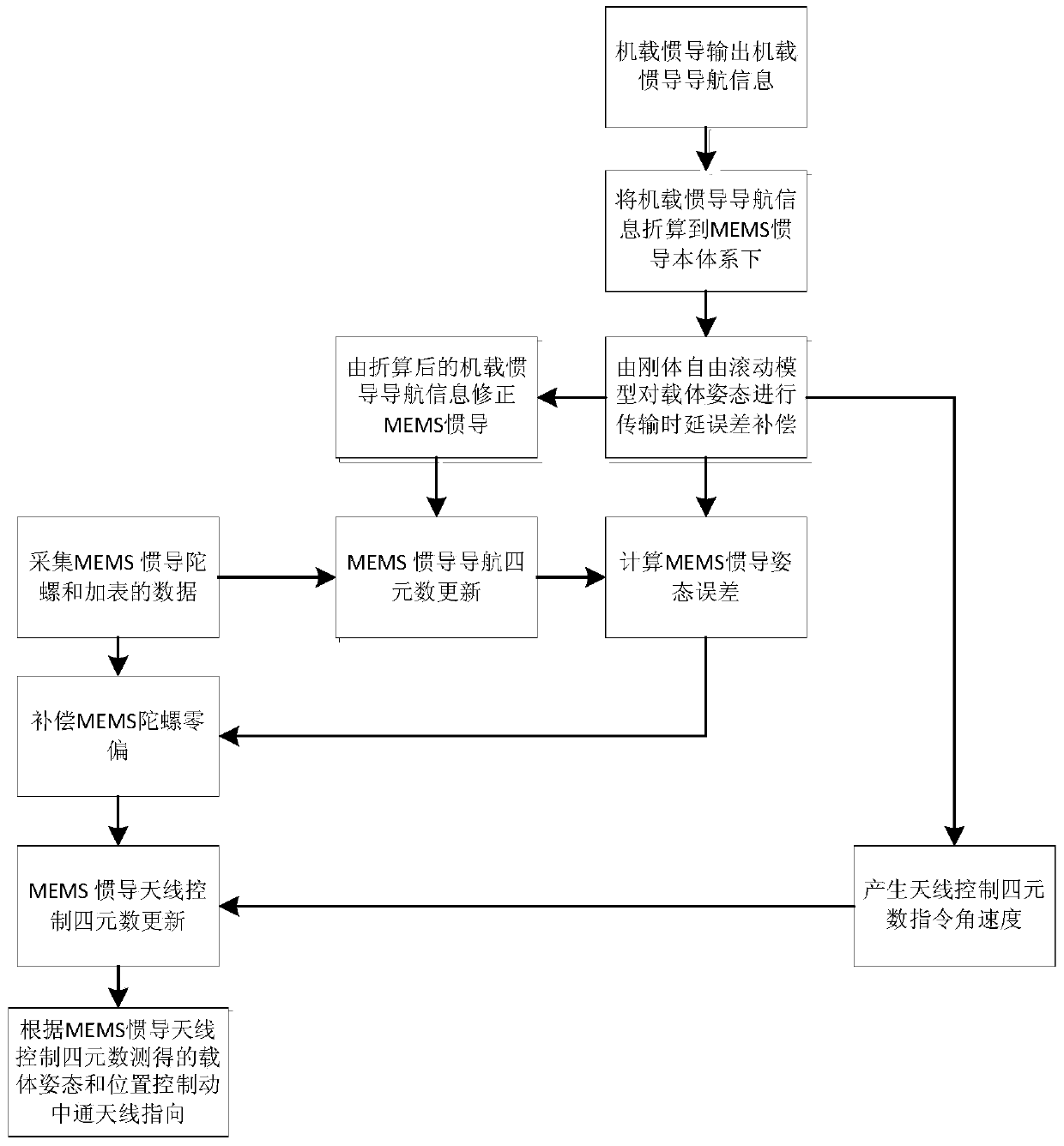
[0019] like figure 1 Shown is the flowchart of the method of the present invention. The method of the invention uses the precise navigation information of the airborne inertial navigation to correct the navigation error of the MEMS inertial navigation.
[0020] The main steps of the inventive method are as follows:
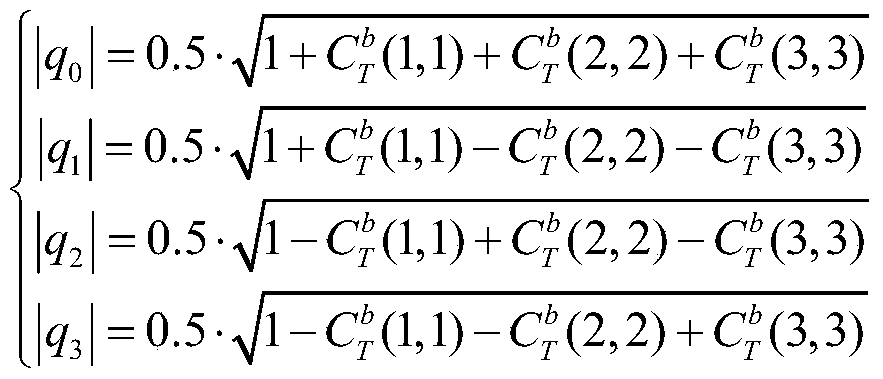
[0021] (1) When the airborne inertial navigation information is valid, obtain the navigation information of the airborne inertial navigation, including the azimuth ψ of the carrier p , pitch angle θ p , roll angle γ p , according to the azimuth ψ p , pitch angle θ p , roll angle γ p Get the attitude matrix of the airborne inertial navigation Attitude Quaternion Q 0 .
[0022] The effective time of the navigation information of the airborne inertial navigation here refers to the time when the transmission of a frame of navigation attitude data transmitted from the airborne bus to the communication system in motion is completed.
[0023] How to get from t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More