

Zero-force control method and system for robot
A zero-force control and robot technology, applied in the field of zero-force control, can solve problems such as inability to apply robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
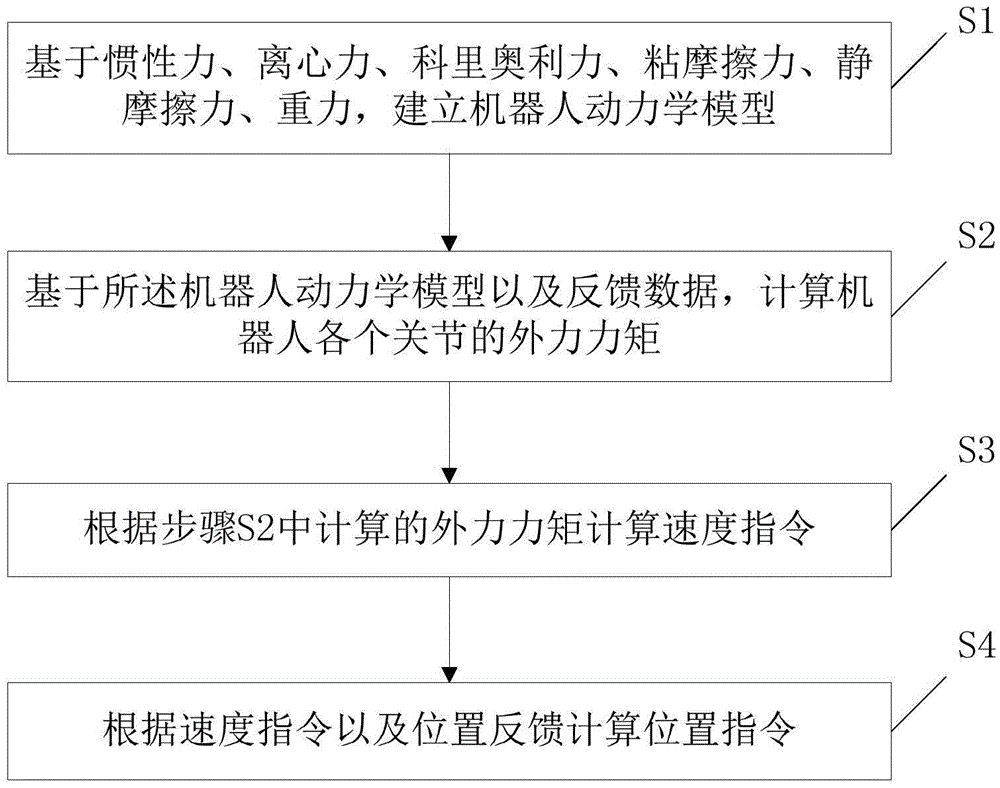
[0060] like figure 1 Shown is the flowchart of the robot zero force control method of the present invention;
[0061] The robot zero-force control method of the present invention includes:
[0062] S1. Establish a robot dynamics model based on inertial force, centrifugal force, Coriolis force, viscous friction force, static friction force, and gravity;
[0063] S2. Based on the dynamic model of the robot and the feedback data, calculate the external force moment of each joint of the robot;
[0064] S3. Calculate the speed command according to the external force torque calculated in step S2;
[0065] S4. Calculate the position command according to the speed command and the position feedback.
[0066] Wherein, the kin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More