

Automatic re-correction method of robot arm
A technology of robotic arm and calibration method, which is applied in the direction of manipulators, robots, program-controlled manipulators, etc., and can solve problems such as pausing the production line after a lot of trouble
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to achieve the above-mentioned purpose, the technical means and effects thereof adopted by the present invention are now given as preferred embodiments, and are described as follows in conjunction with the accompanying drawings.
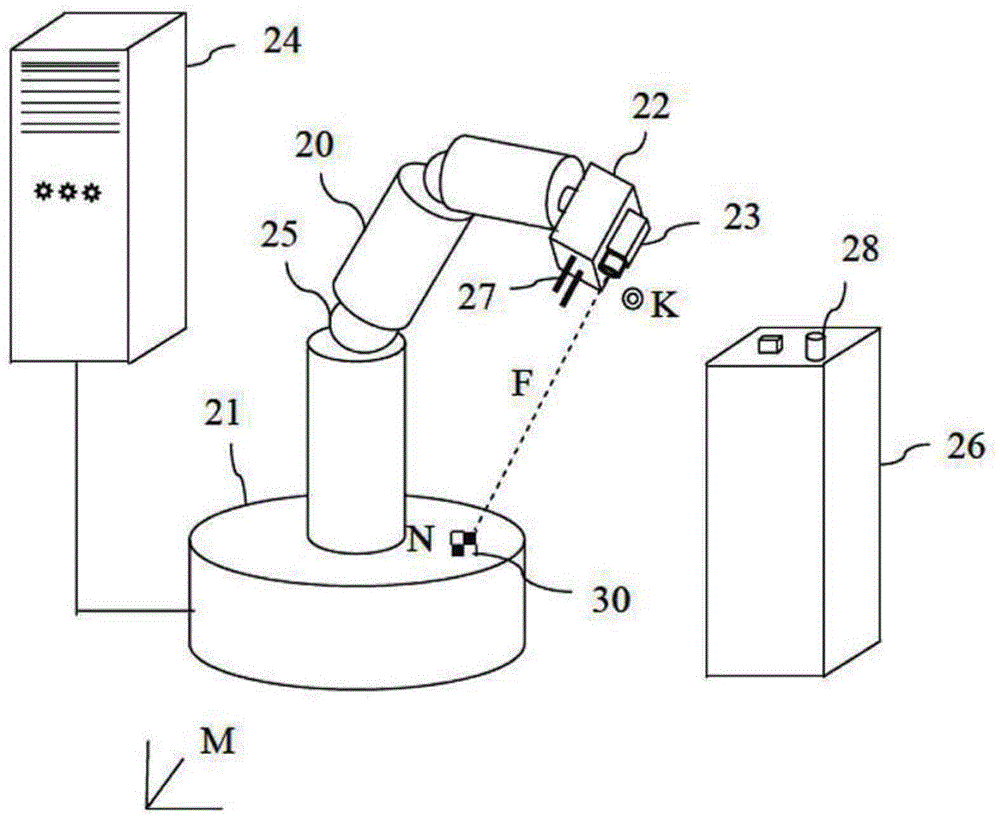
[0017] see figure 2 , is a schematic diagram of the recalibration robot arm of the present invention. The present invention re-calibrates the robot arm 20 installed in the working environment, wherein one end of the robot arm 20 is a fixed body 21 with an arm reference coordinate M, and the movable part 22 at the other end of the robot arm 20 An on-arm camera 23 is installed. Through the control device 24 of the robot arm 20, the camera 23 on the arm is instructed to capture images, and according to the analysis and processing of the captured images, the multiple toggle joints 25 driving the robot arm 20 are controlled, and the movable part 22 is guided to approach the working environment. The workpiece 28 of the working machine 26...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More