

Antagonistic pneumatic muscle-driven bionic knee joint with variable rotation axis and large rotation angle
A technology of pneumatic muscles and large turning angles, applied in the field of bionic robots, can solve problems such as complex mechanism design and difficult control, and achieve the effects of simple mechanism, increased swing angle range, and high ground clearance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
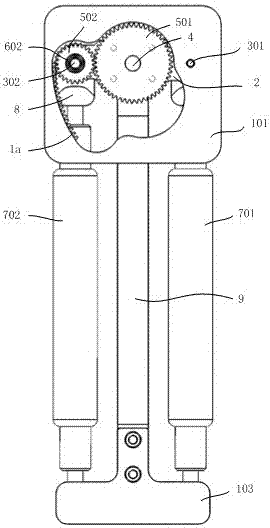
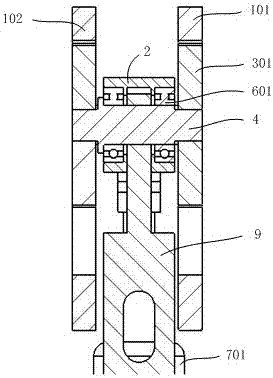
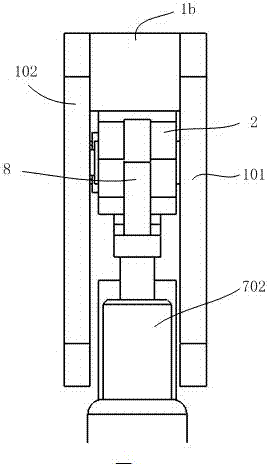
[0012] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0013] Such as figure 1 , figure 2 and image 3 As shown, the present invention includes a first upper fixed seat 101, a second upper fixed seat 102, a lower fixed seat 103, an arc-shaped rack 1a, a limit block 1b, a joint seat 2, a first shaft pin 301, a second shaft Pin 302 , joint shaft 4 , first spur gear 501 , second spur gear 502 , first bearing 601 , second bearing 602 , first pneumatic muscle 701 , second pneumatic muscle 702 , I-shaped joint 8 and joint bracket 9 . A joint seat 2 is arranged between the first upper fixed seat 101 and the second upper fixed seat 102, and one end of the joint seat 2 is hinged with the first upper fixed seat 101 and the second upper fixed seat 102 through the first pivot pin 301, and the second upper fixed seat 102 is hinged. One end of a pneumatic muscle 701 is fixedly connected with an I-shaped join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More