Marine environment self-recognition track accurate tracking method of autonomous underwater vehicle
A technology for underwater robots and marine environments, which is applied in three-dimensional position/channel control and other directions, and can solve problems such as strong coefficient sensitivity and weak anti-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
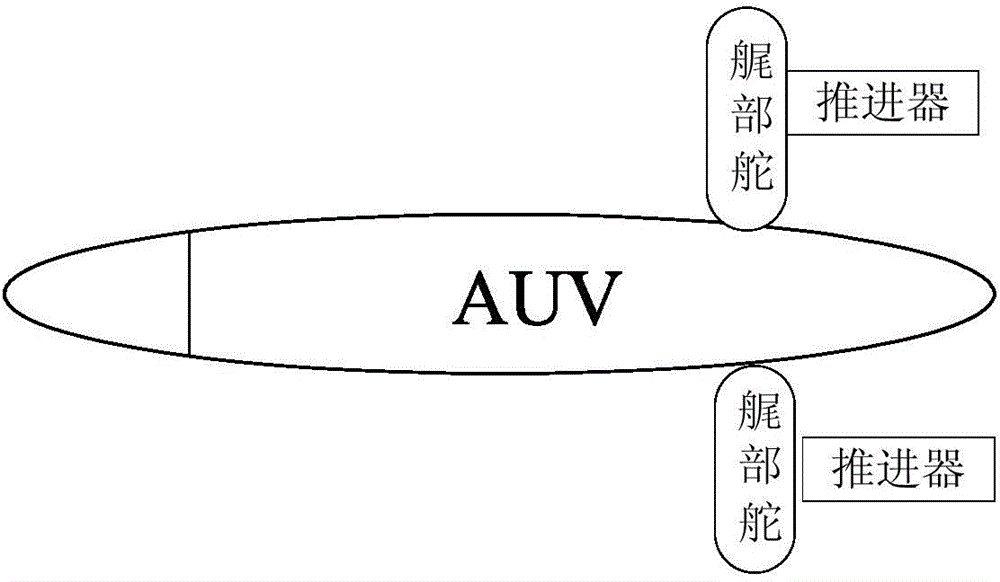
[0030] The hardware requirement of the present invention is an AUV, the stern is equipped with 2 horizontal rudders, and 2 propulsion motors are housed on the stern horizontal rudders; a stern is configured with a vertical rudder, such as figure 1 shown. After the AUV design is completed, the hydrodynamic test of the pool is carried out first to obtain the hydrodynamic coefficient of the AUV. Then the precise track tracking controller of AUV is designed according to the method of the present invention. Finally, the AUV using the method of the present invention will be used for sailing tests to verify the correctness of the control method.
[0031] The AUV precise track tracking control method of the present invention includes marine environment parameter identification and precise track tracking control methods, and the following two aspects...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More