

Underwater robot control method of rotatable rudder propeller
A technology of underwater robot and control method, which is applied in the direction of three-dimensional position/channel control, etc., can solve the problems of weak sensitivity and anti-interference, and achieve the effects of reduced performance, good robustness, and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
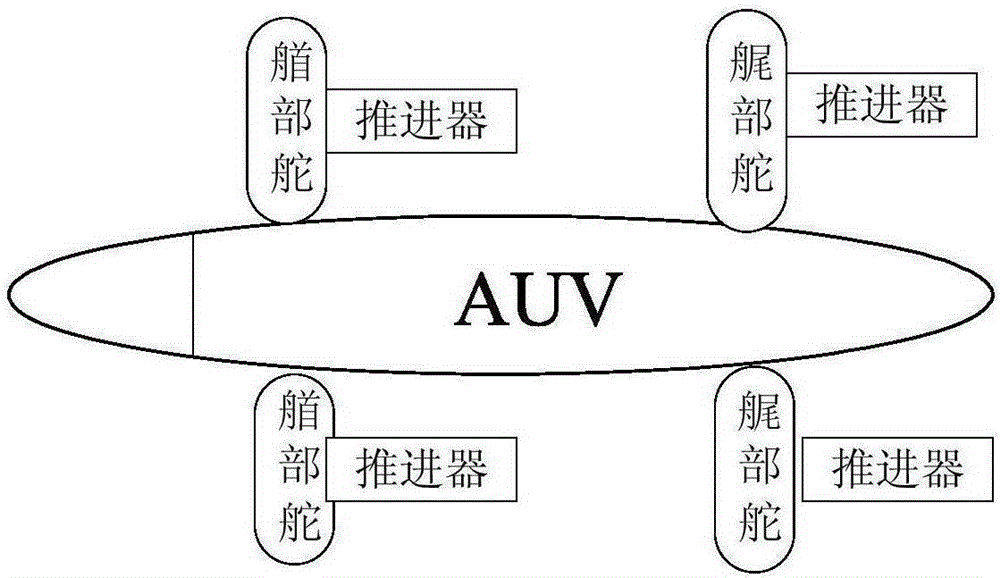
[0029] The hardware requirement of the present invention is an AUV. The bow of the AUV is equipped with 2 horizontal rudders, and 2 propulsion motors are installed on the bow horizontal rudders; motor; configure a vertical rudder at the stern, such as figure 1 shown.
[0030] The AUV motion control method of the present invention comprises the following contents:
[0031] The role of speed control is to keep the AUV sailing at a specified forward speed. There are two types of speed control, one is speed open-loop control, which directly outputs and controls the axial thrust of the propeller without considering the speed feedback; the other is speed closed-loop control, which introduces speed feedback into the design of the speed controller. The linearity of speed control is relatively high, so the classical linear control method is adopted....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More