

Height and direction adaptive service robot and adaptive method
A service robot and robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems that robots do not have height adjustment, communication discomfort, and inability to interact with people, etc., to reduce unit performance requirements, enrich business function features, The effect of improving interactive comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
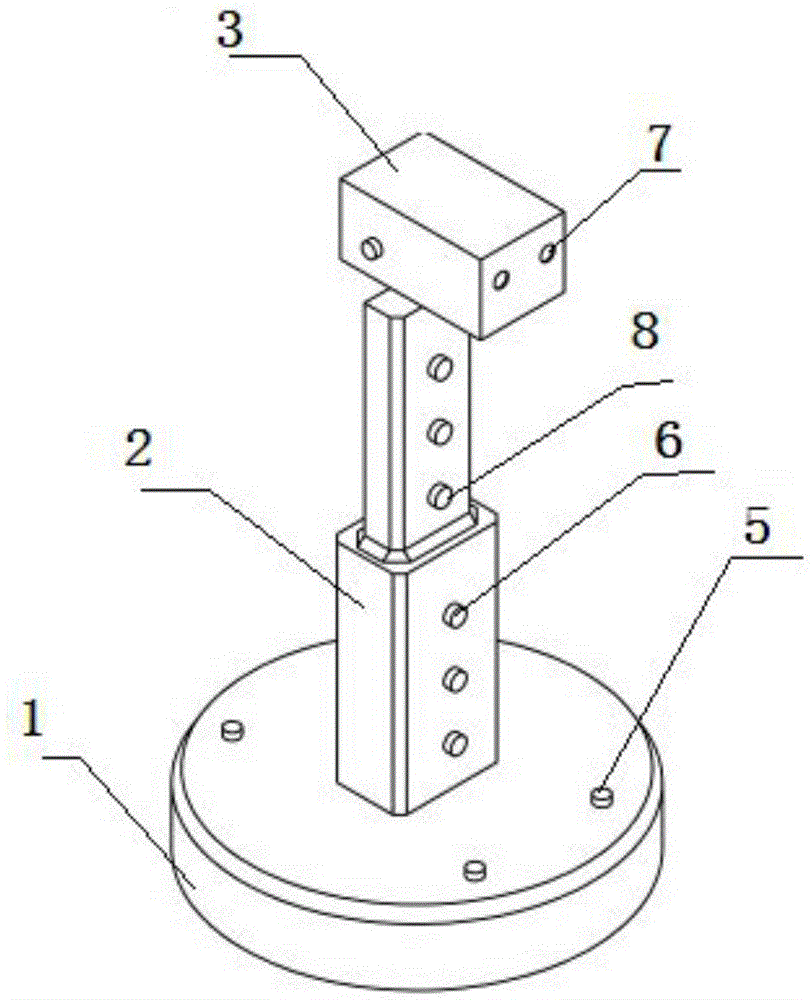
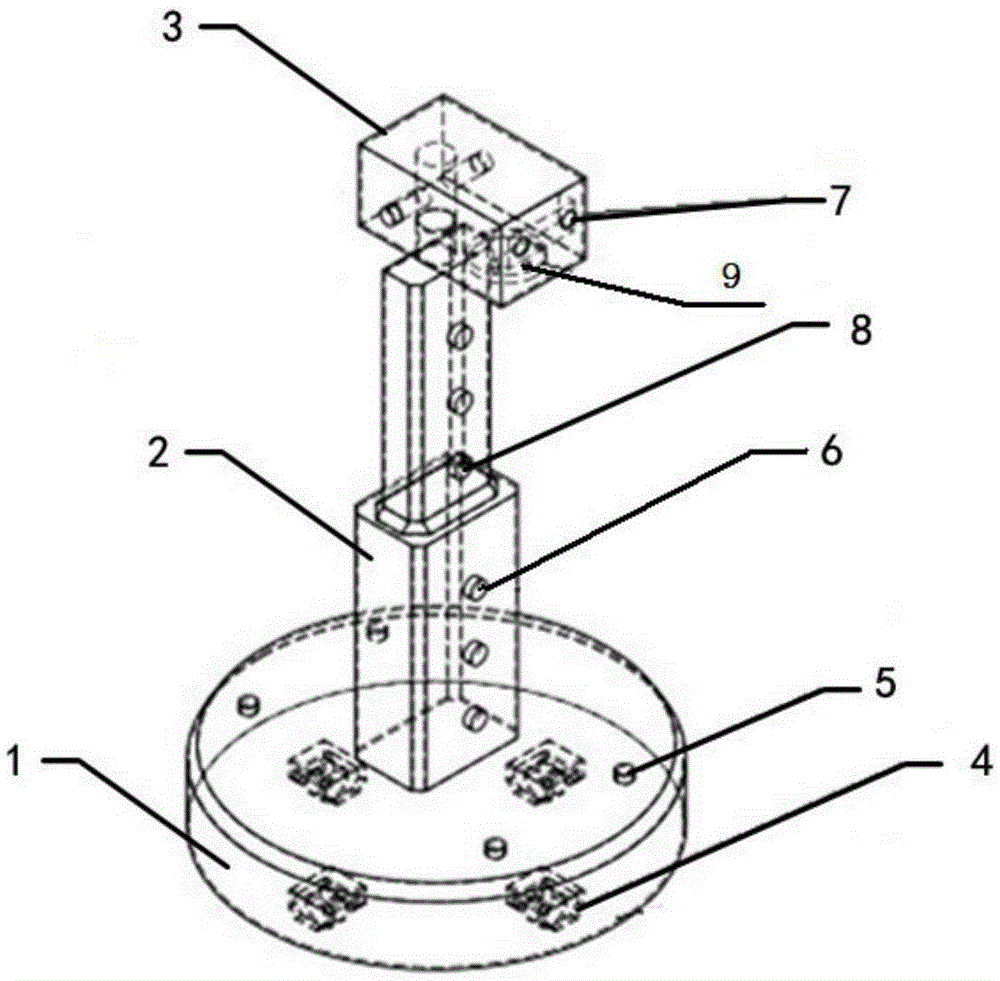
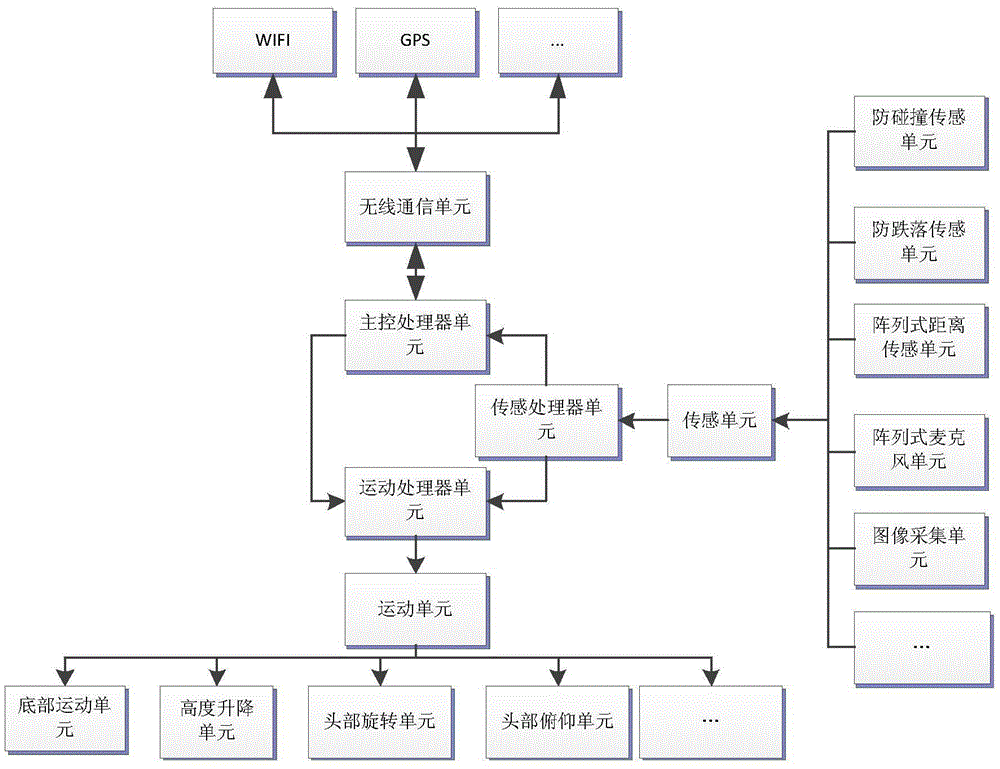
[0027] see Figure 1 to Figure 3 , a highly orientation-adaptive service robot in this embodiment includes a robot motion unit, a sensor unit, a wireless communication unit, and a distributed processor unit.
[0028] The motion unit includes: robot height lift unit, bottom motion unit, head rotation unit, and head pitch unit.
[0029] The sensing unit includes: the robot anti-collision sensing unit, the vertical array distance sensing unit of the height lifting unit, the vertical sound orientation sensing unit of the height lifting unit, the ring sound orientation sensing unit of the head, and the image acquisition unit. The depth camera unit or ordinary camera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More