

Differential type anti-strong-interference real time velometer based on Arduino, and control method thereof
A control method and technology with strong interference, applied in instruments, measuring devices, linear/angular velocity measurement, etc., can solve the problems that the data cannot faithfully reflect the actual speed, the occurrence of feedback dead zones, the influence of data errors, etc., to reduce the induction angle and improve the accuracy. the effect of avoiding feedback blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
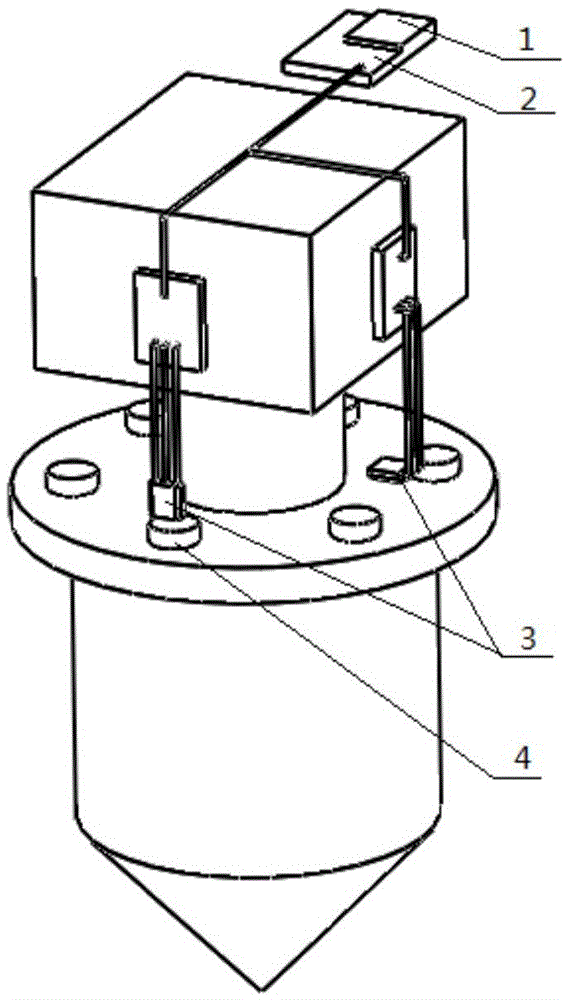
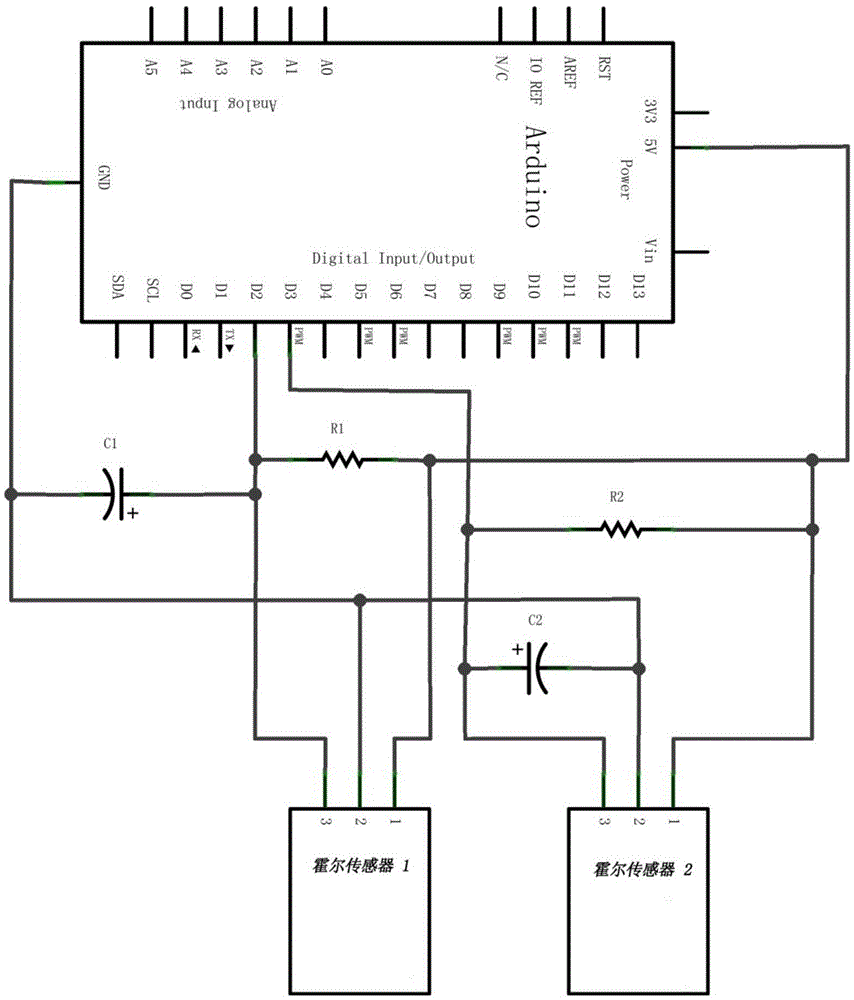
[0032] Such as Figure 1-Figure 3 As shown, the present embodiment is a real-time velocimeter based on differential anti-strong interference of Arduino, including a single-chip microcomputer system 1, a filter circuit 2, a Hall sensor module 3 and a magnetic code disc 4, and the Hall sensor module includes a sensor for detecting The first Hall sensor of the rotational speed signal and the second Hall sensor used to detect the interference signal, the single-chip microcomputer system adopts the Arduino UNO system with two interrupt input interfaces, which are respectively connected to the first Hall sensor and the second Hall sensor; One end of the filter circuit is connected to the Arduino UNO system, and the other end is connected to the Hall sensor module. A filter circuit is also connected between the Hall sensor and the single-chip microcomputer, and the high-frequency signal is removed by the filter circuit, so that the single-chip microcomputer can obtain a good and stab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More