

Multi-vision feature vehicle detection method based on multi-sensor fusion
A multi-sensor fusion, vehicle detection technology, applied in instruments, character and pattern recognition, computer parts and other directions, can solve problems such as low robustness, reduce image processing time and overcome low robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0018] The embodiment of the present invention provides a multi-sensor fusion-based multi-visual feature vehicle detection method, comprising the following steps:
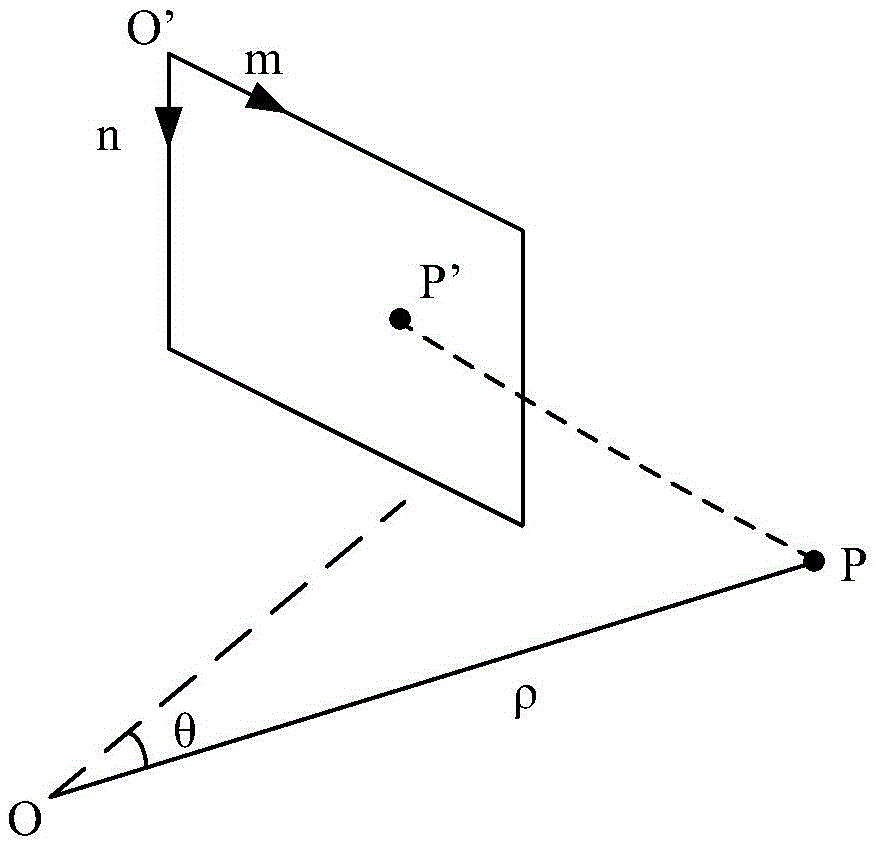
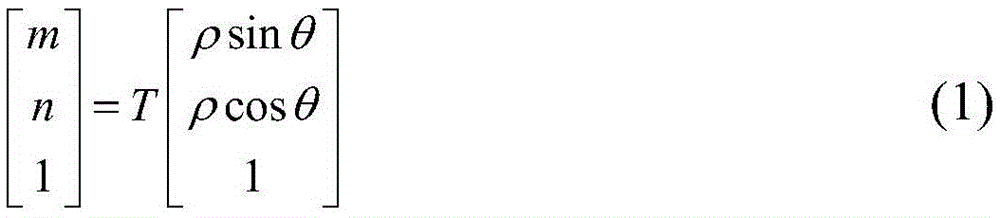
[0019] Step S1: In a dynamic scene, spatially align the image information and vehicle data information simultaneously observed by the camera and the millimeter-wave radar. Such as figure 1 As shown, Oρθ is the millimeter-wave radar coordinate system, O'mn is the camera image coordinate system, P' and P represent the image information and Vehicle data information. Therefore, the vehicle data information observed by the millimeter-wave radar is projected into the image information observed by the camera through the coordinate transformation relation (1), an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More