

A Multi-parameter Synchronous Visual Inspection and Tracking Method for Trapezoid Welds with Variable Gap
A visual inspection and multi-parameter technology, which is applied in welding equipment, arc welding equipment, manufacturing tools, etc., can solve the problem that the inflection point of the trapezoidal weld cannot meet the welding requirements, and cannot obtain the size of the weld gap and the height direction Z Direction deviation and other problems can be solved to save image processing time, improve real-time performance and adaptability, and reduce requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0077] The specific steps of the variable-gap trapezoidal weld multi-parameter synchronous visual detection and tracking method in this embodiment are:
[0078] The first step, image processing and feature extraction
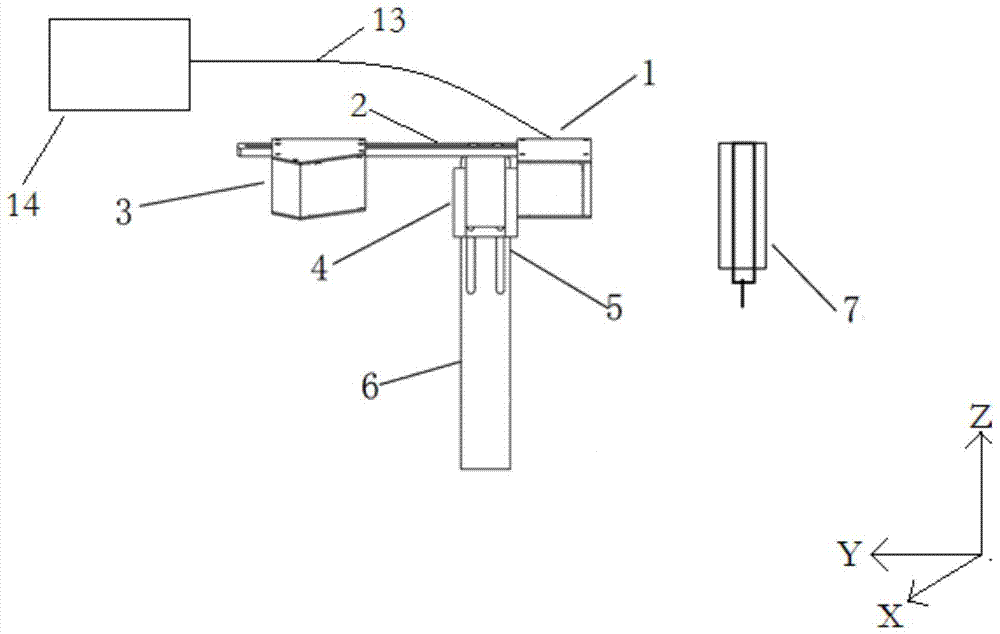
[0079] 1-1 Image Acquisition: Acquire the image of the weld area including laser stripes through the smart camera sensor;
[0080] 1-2 Image threshold adaptive segmentation: On the basis of step 1-1, select the pixel value with the same number of pixels with the largest number of pixel values as the threshold value on the basis of step 1-1, and select the pixel value greater than the threshold value in every five columns , which is determined as an effective point of the laser stripe, and the effective point is segmented from the image;
[0081] 1-3 Laser stripe center line extraction: extract the effective points of the laser stripes determined in step 1-2 column by column, extract the effective points of each column of laser stripes, and store the intermedi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More