

A Fast Robot Vision Positioning Method Based on Dead Reckoning
A technology of robot vision and positioning method, applied in the field of visual positioning of mobile robots, can solve the problems of low ultrasonic propagation speed, insufficient positioning accuracy to achieve positioning, affecting positioning accuracy, etc., to shorten image processing time and reduce image processing time. , to ensure the effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0035] The specific implementation of the whole process of the present invention is illustrated below by way of example:
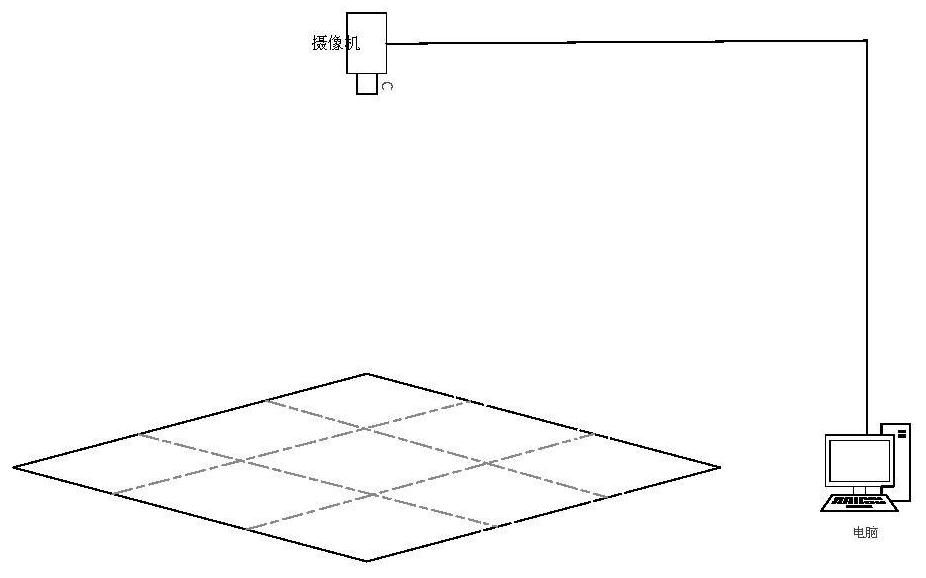
[0036] Step 1. Install the camera on the R-shaped bracket, fix it at a certain height, and ensure that the camera mirror is level with the positioning area, then connect the power supply and network cable, start shooting, and use the upper computer software on the desktop computer to obtain the original color image of the positioning area. Such as figure 1 shown.
[0037] Step 2: Adjust the lens aperture and focus well and keep it unchanged, place the calibration board in the positioning area, then continuously change the calibration board pose in front of the lens, collect multiple images, obtain the calibration board images in different poses and save.
[0038] Step 3: After the acquisition is completed, use MATLAB to process the image of the calibration board, perform camera calibration, and obtain camera parameters.
[0039]Step 4. Under normal circ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More