A pick-up robot
A technology of robot and mechanical arm, which is applied in the field of picking robots, can solve the problems of inaccuracy and unstable clamping, and achieve the effect of high efficiency, simple structure, precise and stable clamping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
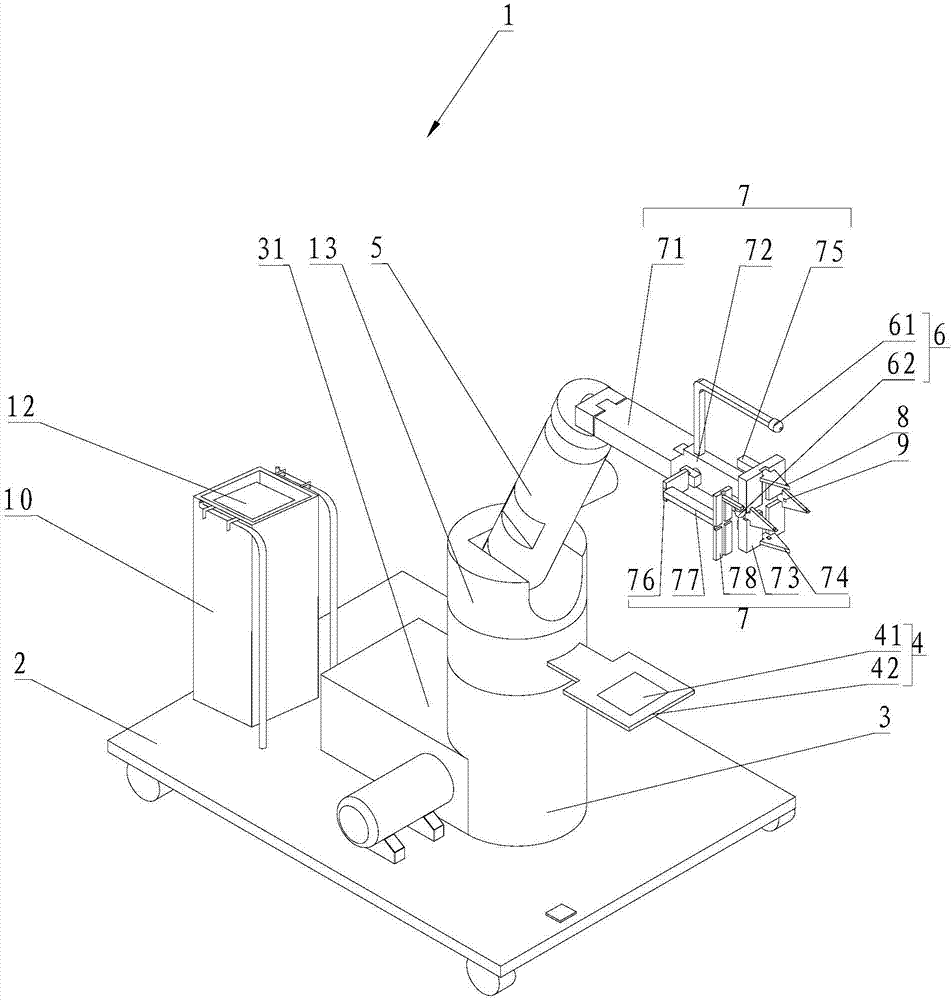
[0039] Please refer to figure 1 , figure 2 with image 3 , The first embodiment of the present invention is:
[0040] A fetching robot 1 includes a walking device 2, a lifting device 3, a control device 4, a telescopic device 5, a detection device 6 and an execution device 7. The lifting device 3 is provided on the walking device 2, and the control device 4 is provided On the lifting device 3, the reversing device 13 is provided on the control device 4, the telescopic device 5 is rotatably provided on the reversing device 13, and the execution device 7 includes a first mechanical arm 71 and a second mechanical arm. The arm 72, the base plate 73, two or more clamping plates 74 and two or more driving devices 75, one end of the first robotic arm 71 is rotatably arranged on the telescopic device 5, and the second robotic arm 72 One end is connected to the other end of the first robot arm 71, the base plate 73 is rotatably arranged on the other end of the second robot arm 72, two or...
Embodiment 2
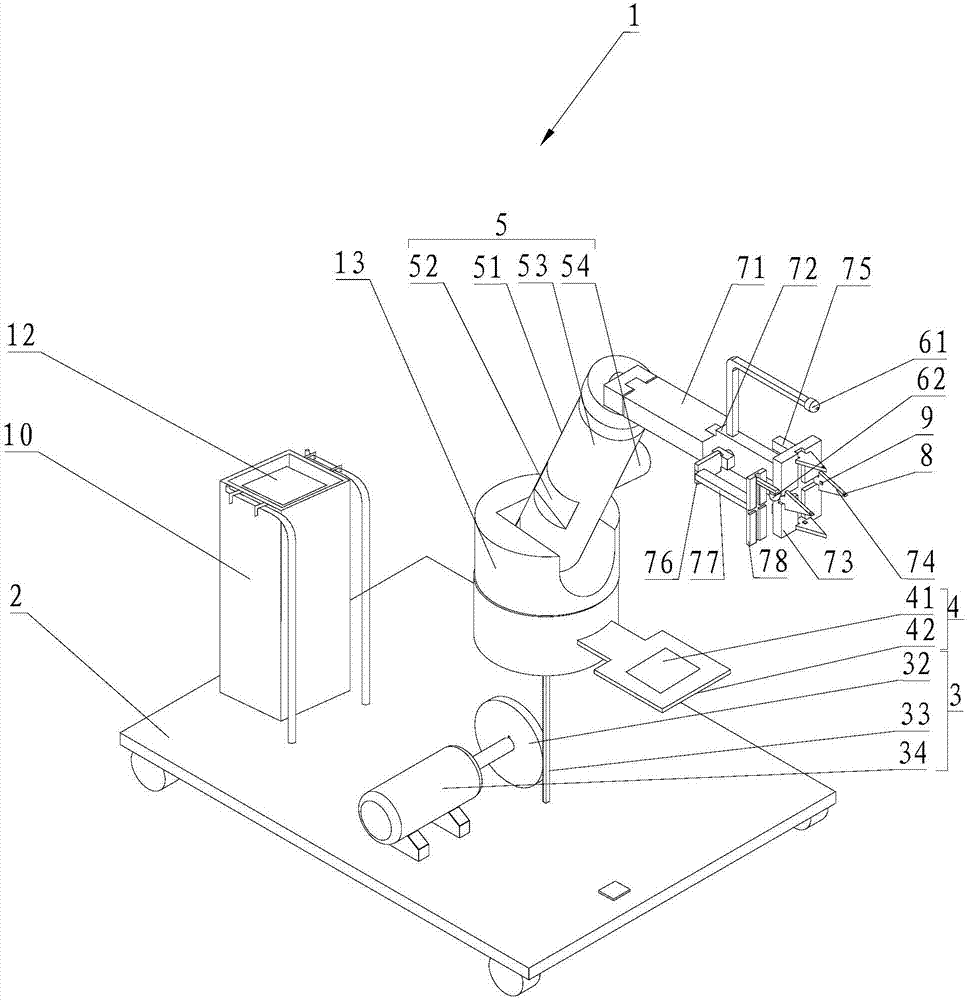
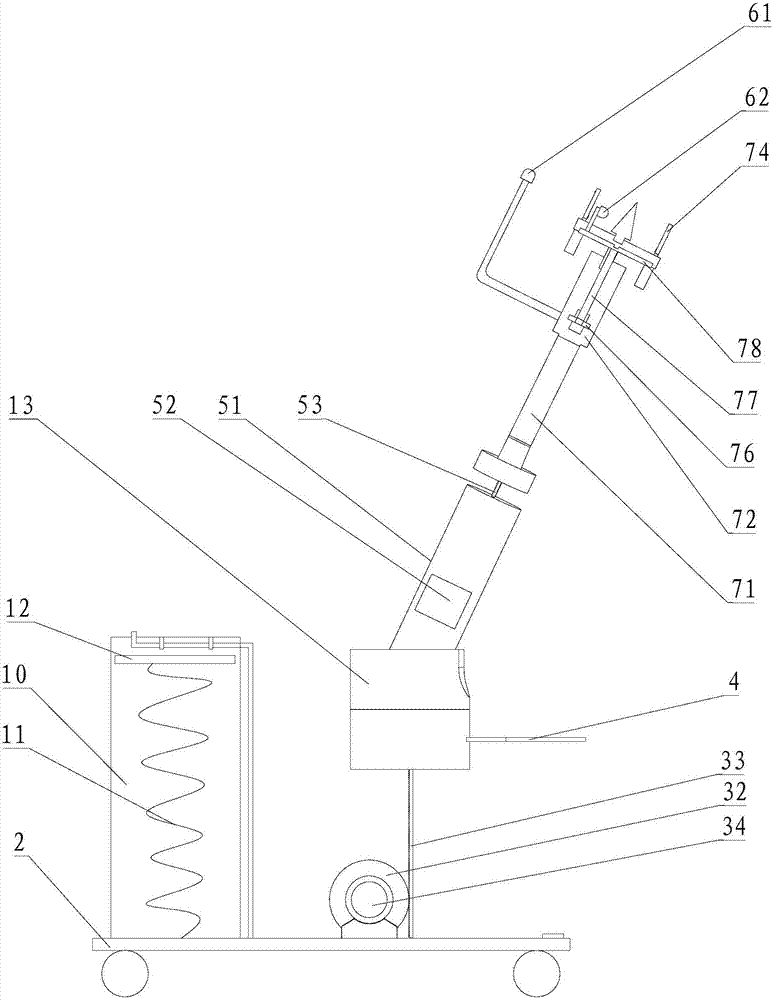
[0041] Please refer to Figure 4 with Figure 5 , The second embodiment of the present invention is:
[0042] A fetching robot 1 includes a walking device 2, a lifting device 3, a control device 4, a telescopic device 5, a detection device 6 and an execution device 7. The lifting device 3 is provided on the walking device 2, and the control device 4 is provided On the lifting device 3, the reversing device 13 is provided on the control device 4, the telescopic device 5 is rotatably provided on the reversing device 13, and the execution device 7 includes a first mechanical arm 71 and a second mechanical arm. The arm 72, the base plate 73, two or more clamping plates 74 and two or more driving devices 75, one end of the first robotic arm 71 is rotatably arranged on the telescopic device 5, and the second robotic arm 72 One end is connected to the other end of the first robot arm 71, the base plate 73 is rotatably arranged on the other end of the second robot arm 72, two or more cla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More