

Multi-UAVs distributed formation control method
A control method, multi-UAV technology, applied in non-electric variable control, control/regulation system, three-dimensional position/channel control and other directions, can solve the problems of inability to obtain UAV position information, failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
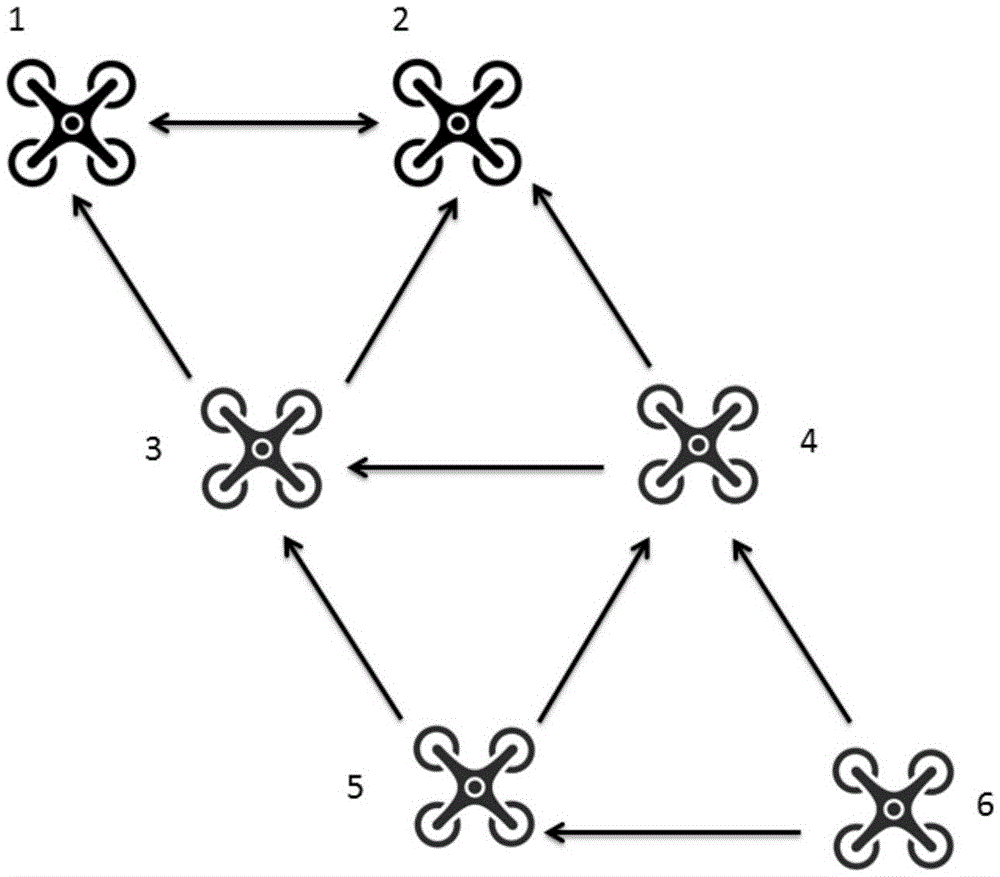
[0041]In a horizontal plane with a horizontal height of 5 meters, deploy 20 quadrotor UAVs (self-made quadrotors based on the open source flight control pixhawk, model: wheelbase 550mm), and number the 20 quadrotor UAVs in sequence, such as Figure 4 shown.
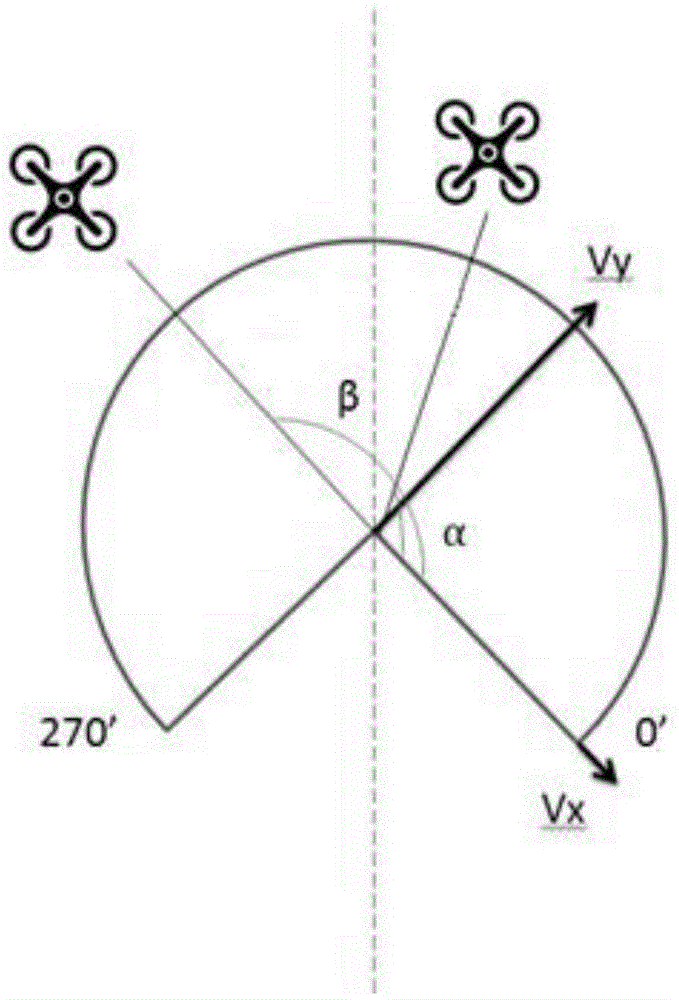
[0042] The UAV satisfies the following motion model in the horizontal plane:
[0043] x i '=u i ,i=1,2,...,n;
[0044] where n is an integer n≥3, x i is the position vector of the UAV in the horizontal plane, x i ′ is the derivative of the position vector of the UAV in the horizontal plane, u i is the velocity vector of the UAV moving in the horizontal plane.
[0045] The hardware system of the UAV is realized by cascading two embedded motherboards. One embedded motherboard is used as a flight controller to directly drive the underlying physical devices; the other embedded motherboard can be used to provide interfaces for external sensors, acquire sensor data and execute high-level distributed formation control alg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More