New energy automobile charger
A new energy vehicle and charging device technology, applied in electric vehicle charging technology, charging stations, electric vehicles, etc., can solve the problems of difficult adaptation of the linkage mechanism and difficult bending of the mechanical arm, and achieve a high degree of automation and a large bending range. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
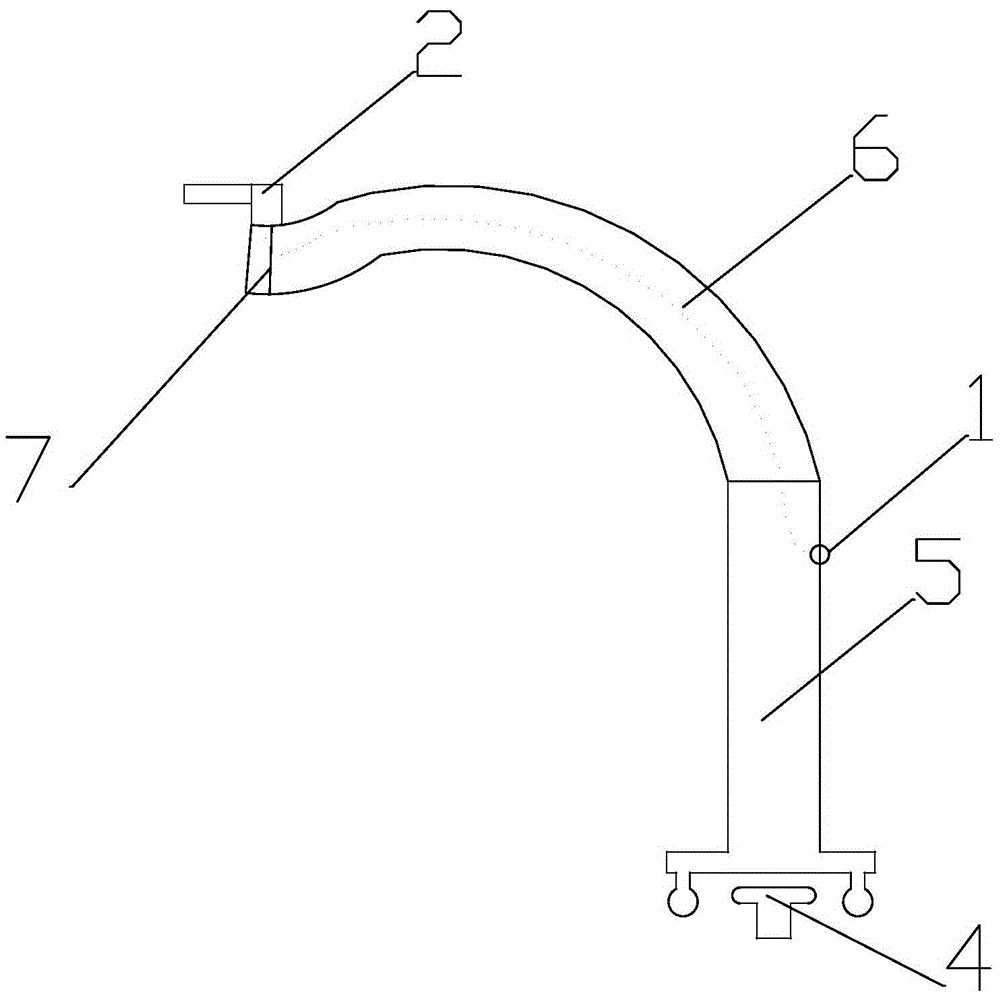
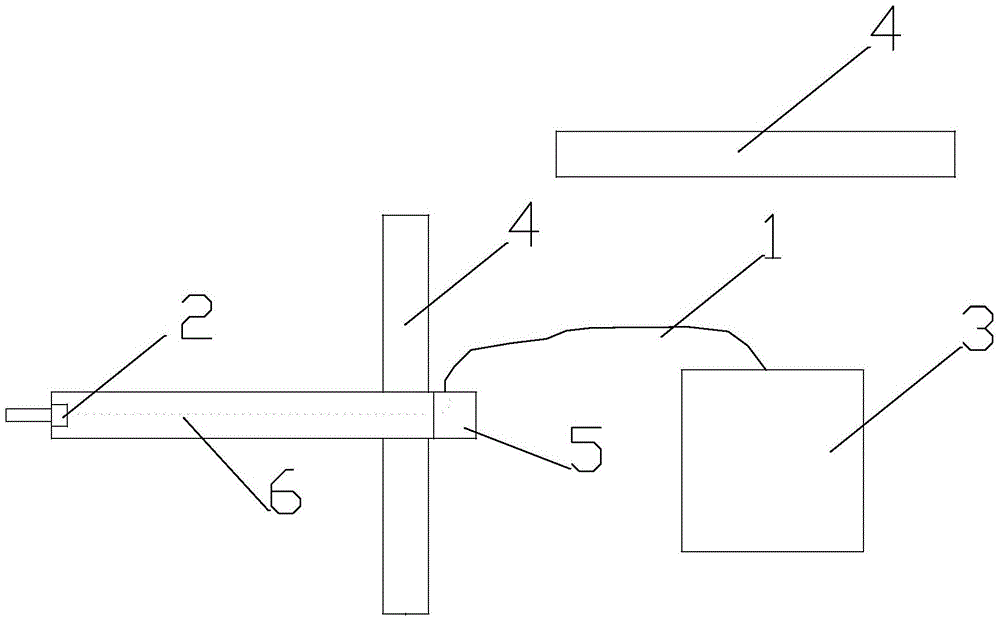
[0015] Embodiment: The present invention includes a charging pile 3 and a charging gun 2 connected to the charging pile 3 through a charging line 1, and also includes a mechanical arm 6, a guide rail 4 matched with the charging pile 3, and a walking trolley 5 located on the guide rail 4. One end of the mechanical arm 6 is installed on the walking trolley 5 , and the charging gun 2 is installed on the other end of the mechanical arm 6 . The guide rail 4 is arranged parallel to one side of the charging pile 3 or vertically arranged on one side of the charging pile 3 . The mechanical arm 6 is provided with an image recognition sensor 7 for identifying the socket of the new energy vehicle and the charging gun, wherein the charging line 1 can be installed on the walking trolley 5 through the crawler.
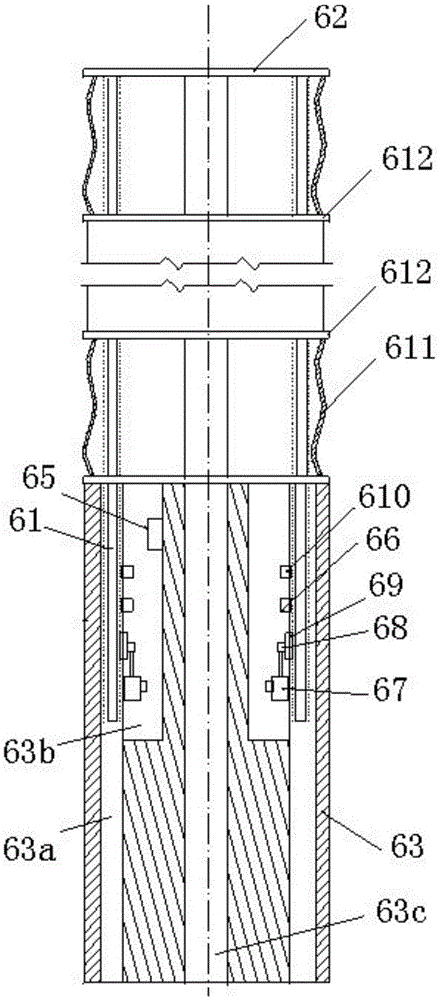
[0016] The mechanical arm 6 includes a screw 61 and at least one joint, the screw 61 is at least three, and the joint includes a head module 62 and a base 63 provided with a guide ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More