

Powder metallurgy robot and its grasping method
A technology of powder metallurgy and robotics, applied in the field of robotics, can solve problems such as increased labor costs and low efficiency, and achieve the effect of automatic grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below, in conjunction with accompanying drawing and specific embodiment, the present invention is further described:
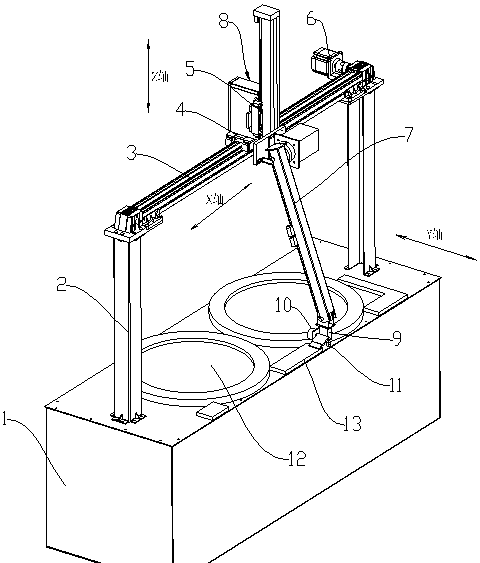
[0030] like figure 1 As shown, it is a schematic structural diagram of a powder metallurgy robot in a preferred embodiment of the present invention, including a workbench 1, inside the workbench 1 is an electrical cabinet for the robot control system, and two brackets 2 are installed on the surface of the workbench 1, and the X-axis is horizontal The sliding rail 3 is installed on the two brackets 2, and the horizontal sliding rail seat 4 is installed on the X-axis horizontal sliding rail 3, and the Z-axis mobile sliding rail 5 is installed on the horizontal sliding rail seat 4. One end of the traversing slide rail 3 is installed with a first motor 6, and the first motor 6 drives the traversing slide rail seat 4 to reciprocate on the X-axis traversing slide rail 3, thereby driving the Z-axis moving slide rail 5 to move horizontally on the X-axis. Move ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More