

Flexible mechanical arm and control method thereof
A software machine, robotic arm technology, applied in the directions of manipulators, claw arms, manufacturing tools, etc., can solve the problems of no description or report, and data has not been collected, and achieve the effect of large deformability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
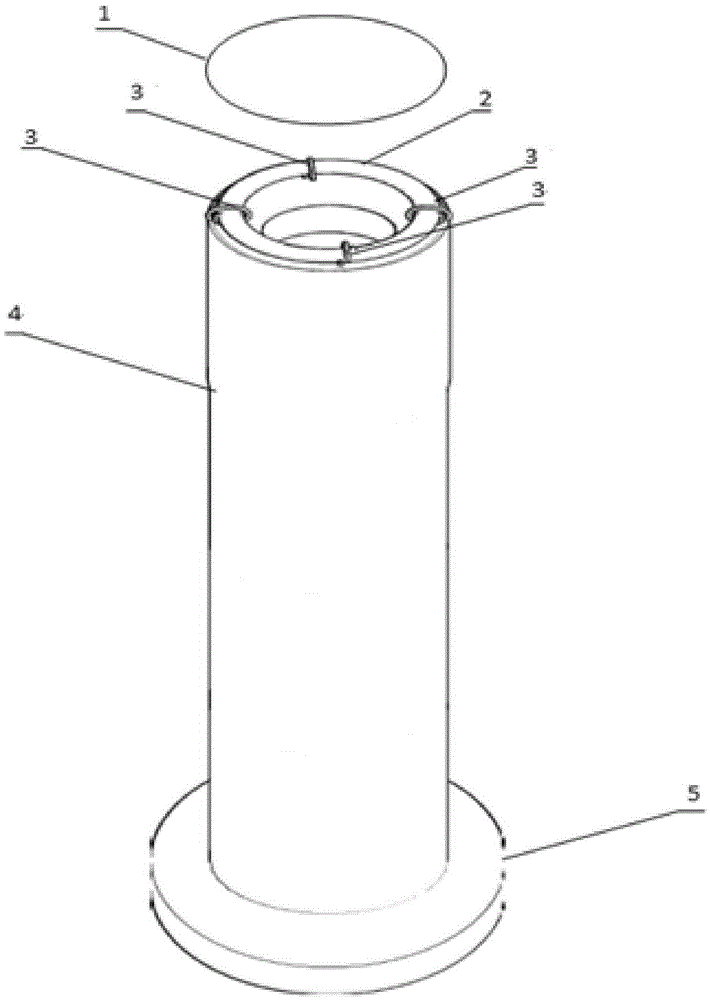
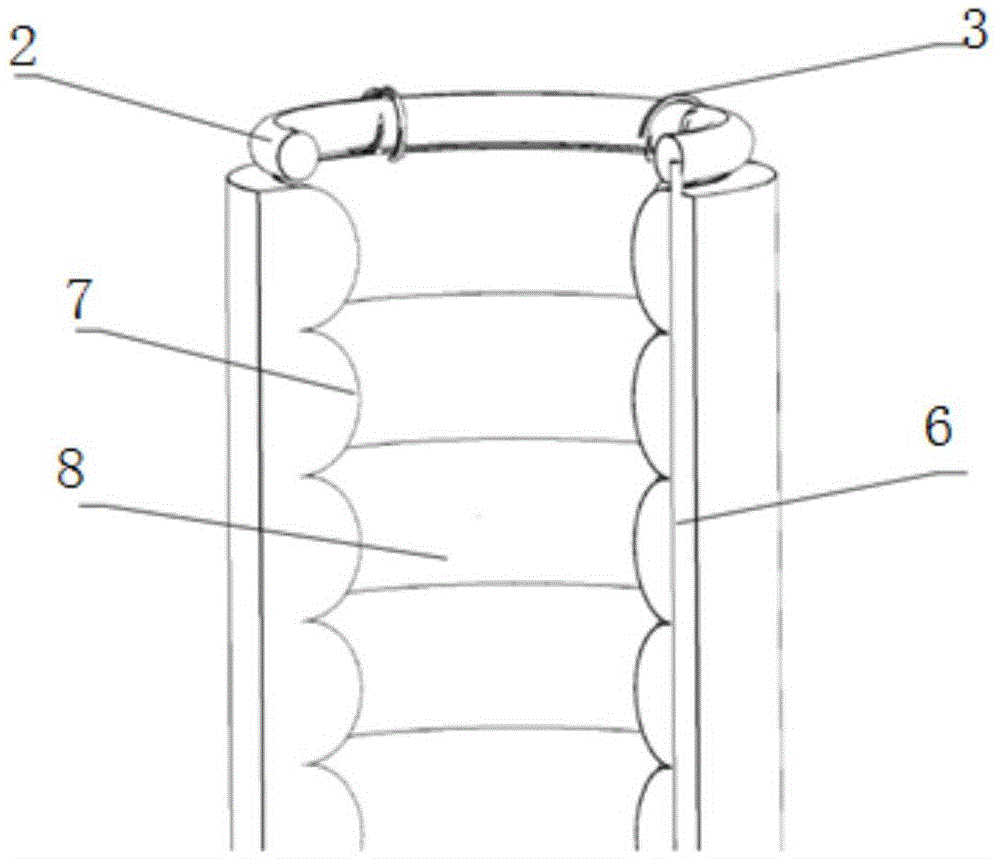
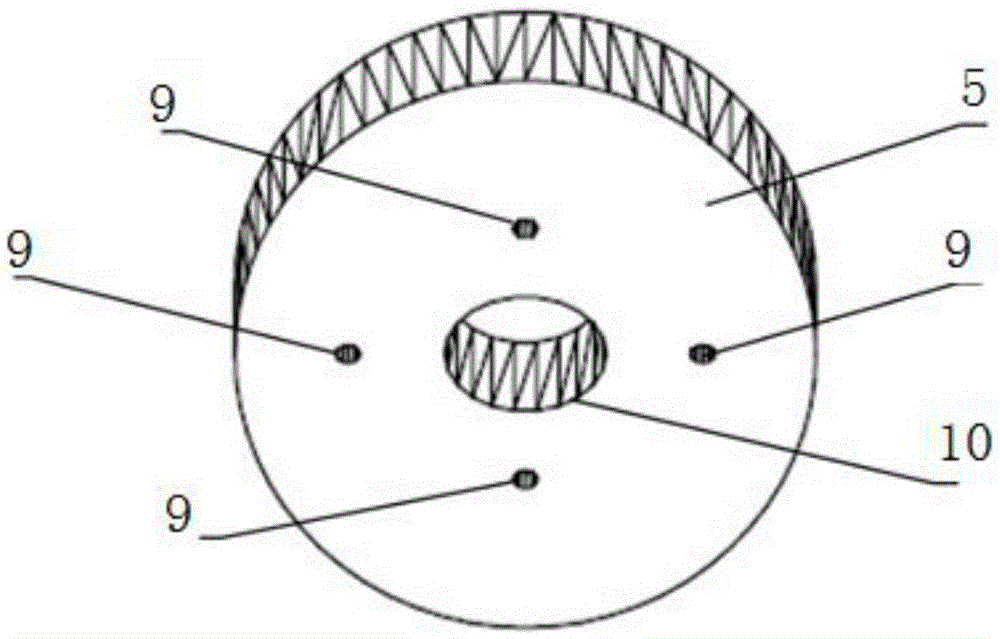
[0041] The soft mechanical arm provided according to the present invention includes: a top fixing device, a main body of a mechanical arm, a base and a control device; The wire makes the main body of the manipulator complete the predetermined deformation.
[0042] The top fixing device includes: a top end cover 1 and a top ring 2, the top end ring 2 is arranged at the top position of the main body of the mechanical arm or inside the main body of the mechanical arm, and the top end cover 1 is installed o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More