Coastal monitoring and defense decision-making system based on multi-dimensional space fusion and method thereof
A technology of spatial fusion and decision-making method, applied in multi-dimensional databases, structured data retrieval, resources, etc., can solve problems such as inability to carry out collaborative defense, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
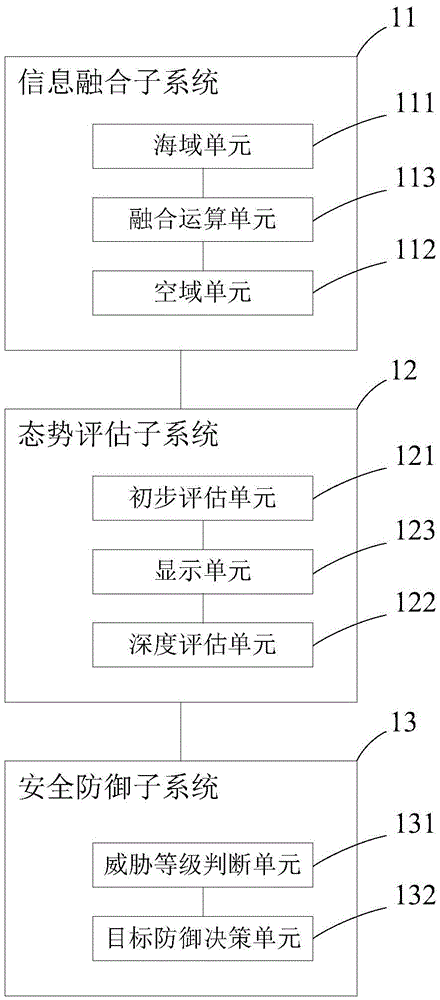
[0064] The present invention provides a coastal monitoring and defense decision-making system based on multi-dimensional space fusion, which integrates and comprehensively processes the monitoring information and data of multi-platform and multi-sensors in coastal waters and airspace to provide situation display and threat assessment, so as to protect the country Sovereignty, safeguarding national security, military defense, marine development, marine management, etc. provide support for decision-making. The system of the present invention mainly includes an information fusion subsystem, a situation assessment subsystem, and a security defense subsystem. The information fusion subsystem utilizes the basis of space to realize the integrated acquisition, transmission, processing, networked sharing and sharing of multi-dimensional and multi-source ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



