

Balancing optimization algorithm for target measuring head
A technology of adjustment optimization and probe, applied in the field of visual measurement, can solve the problems of large data variance, ineffective measurement of data reliability, error amplification, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] Algorithm of the present invention discloses two kinds of schemes, introduces respectively below:
[0070] Option One:
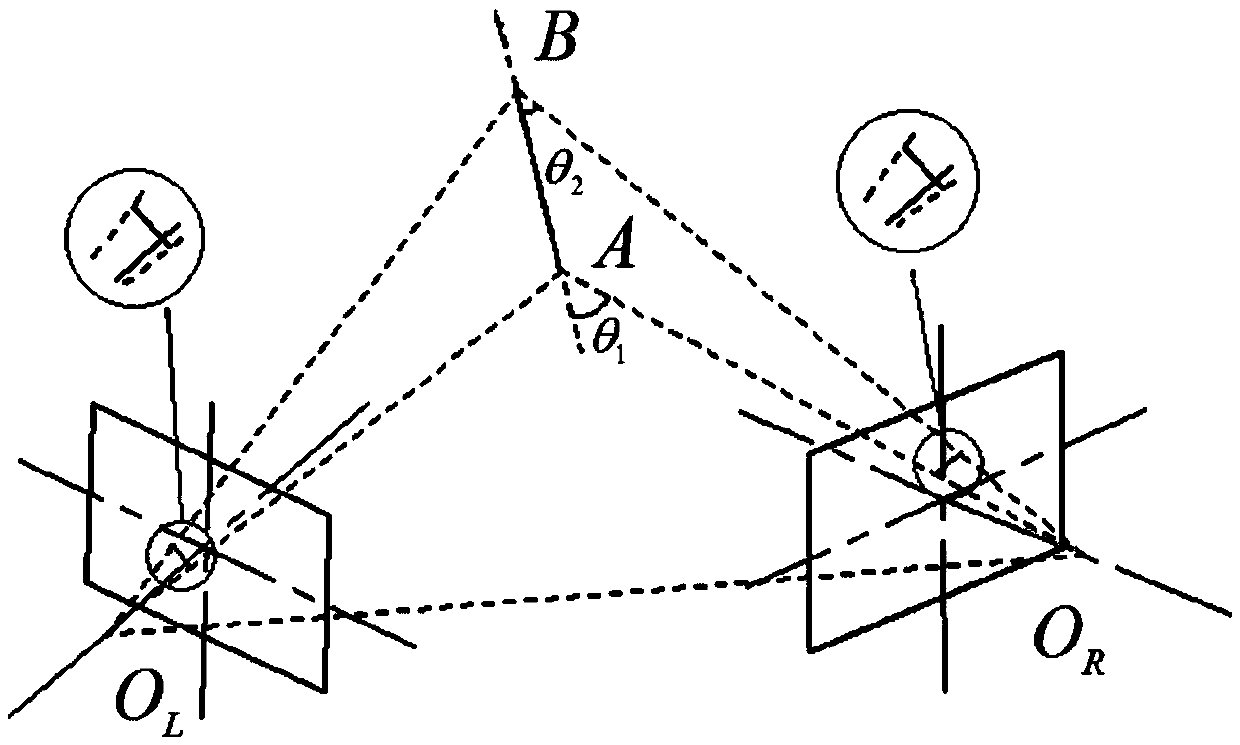
[0071] This algorithm is an optimization algorithm when using a binocular stereo vision system with a hand-held target to measure spatial positioning. Measurement accuracy of the vision system. Its specific implementation operation exists in the measurement process of the binocular stereo vision system. The present invention will be further described in detail below in conjunction with a certain measurement process. (The hand-held target used in this measurement uses LED as the feature point of the space)
[0072] The first step: calibration.
[0073] Firstly, it is necessary to calibrate the built binocular stereo vision system using Zhang Zhengyou’s checkerboard calibration algorithm to obtain the calibration parameters.
[0074] Step 2: Obtain image information.
[0075] After the calibration is completed, use the handheld target to measure t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More