

Active-softening mechanism of hydraulic robot
A hydraulic robot, active and flexible technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of unstable upper platform and large contact force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
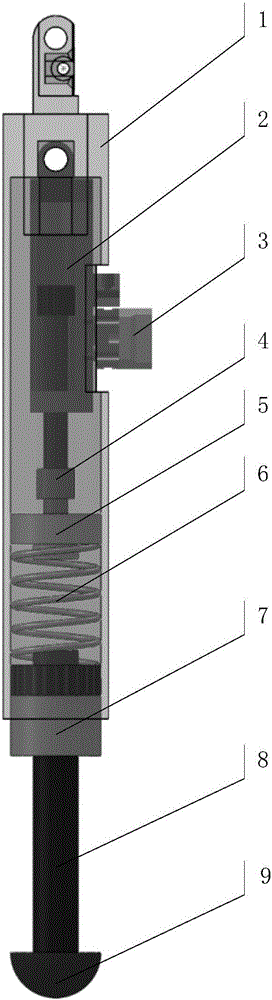
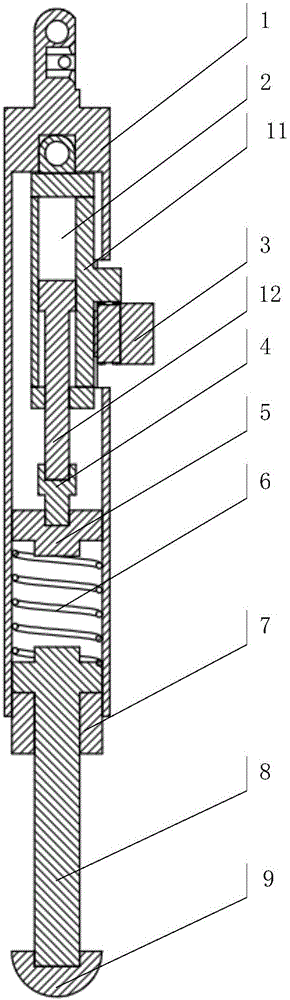
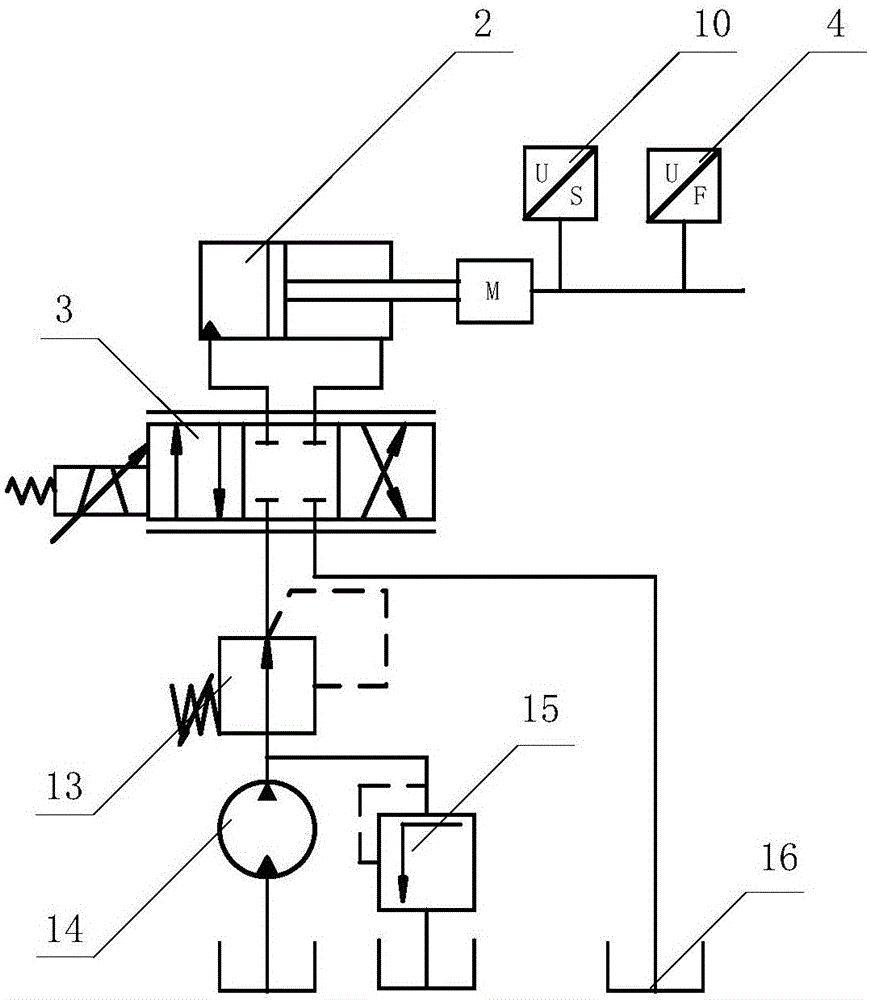
[0031] A hydraulic robot active and compliant foot mechanism, such as figure 1 and figure 2 As shown, it includes: foot sleeve 1, hydraulic cylinder 2, servo valve 3, force sensor 4, slider 5, spring 6, pre-tightening screw 7, foot end rod 8, foot end hemisphere 9, displacement sensor 10; Described hydraulic cylinder 2 is made up of hydraulic cylinder barrel 11 and hydraulic cylinder rod 12;
[0032] Also includes pressure reducing valve 13, hydraulic pump 14, overflow valve 15, oil tank 16;
[0033] The foot sleeve 1 is a hollow sleeve with an open bottom, with a raised platform on the top, and a pin hole on the raised platform for connecting with the leg joints of the robot. The wall of the foot sleeve 1 is provided with an opening. The opening corresponds to the hydraulic cylinder 2; the hydraulic cylinder 2 is placed inside the foot sleeve 1, and the cylinder barrel 11 of the hydraulic cylinder is fixedly connected to the foot sleeve 1; the displacement sensor 10 is loc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More