

Unmanned aerial vehicle ascending and descending smoothly and control method
An unmanned aerial vehicle, stable technology, applied in the field of unmanned aerial vehicles, can solve the problems of reducing the lifting time of the unmanned aerial vehicle, weak anti-jamming ability, and increasing the anti-jamming ability, so as to simplify the structure, reduce the lifting time, and improve the work efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
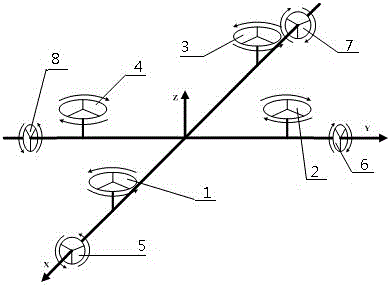
[0037] This embodiment is used for the unmanned aerial vehicle to take off or land under the condition of severe environment and high wind speed.
[0038] Such as figure 2 As shown, the anti-interference UAV device during lifting includes a plurality of auxiliary propellers, and the auxiliary propellers are centered on the cross-shaped frame and symmetrically arranged around the UAV body. The rotation plane of the auxiliary propellers is perpendicular to the horizontal plane, and The direction of rotation plane of the auxiliary propeller is adjustable. There are 4 main propellers on the UAV, namely the first main propeller 1, the second main propeller 2, the third main propeller 3, and the fourth main propeller 4, and the four main propellers are arranged on a cross-shaped frame structure. Considering the arrangement plane of the cross-shaped rack as a Cartesian coordinate plane, the first main propeller 1 and the third main propeller 3 are respectively arranged in the posit...
Embodiment 2
[0045] This embodiment is used in occasions where the UAV takes off and lands in a stable environment.
[0046] Such as image 3 As shown, the anti-interference UAV device during lifting includes a plurality of auxiliary propellers, and the auxiliary propellers are centered on the cross-shaped frame and symmetrically arranged around the UAV body. The rotation plane of the auxiliary propellers is perpendicular to the horizontal plane, and The direction of rotation plane of the auxiliary propeller is adjustable. In this embodiment, the direction of the rotation plane of the auxiliary propeller is adjusted to be parallel to the horizontal plane, which is the same as the direction of the rotation plane of the main propeller. The main propellers include a first main propeller 1, a second main propeller 2, a third main propeller 3, The fourth main propeller 4, and the four main propellers are arranged on the cross-shaped frame structure, and the layout plane of the cross-shaped fra...
Embodiment 3
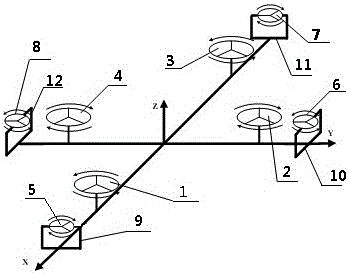
[0054] This embodiment is used in occasions where the UAV takes off and lands in harsh environments and high wind speeds.
[0055] Such as Figure 4 As shown, the anti-interference UAV device during lifting includes a plurality of auxiliary propellers, and the auxiliary propellers are centered on the cross-shaped frame and symmetrically arranged around the UAV body. The rotation plane of the auxiliary propellers is perpendicular to the horizontal plane, and The direction of rotation plane of the auxiliary propeller is adjustable. The main propellers of the UAV include the first main propeller 1, the second main propeller 2, the third main propeller 3, and the fourth main propeller 4, and the four main propellers are arranged on the cross-shaped frame structure, and the cross-shaped frame The layout plane of the plane is regarded as a Cartesian coordinate plane, then the first main propeller 1 and the third main propeller 3 are respectively arranged in the positive and negativ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More